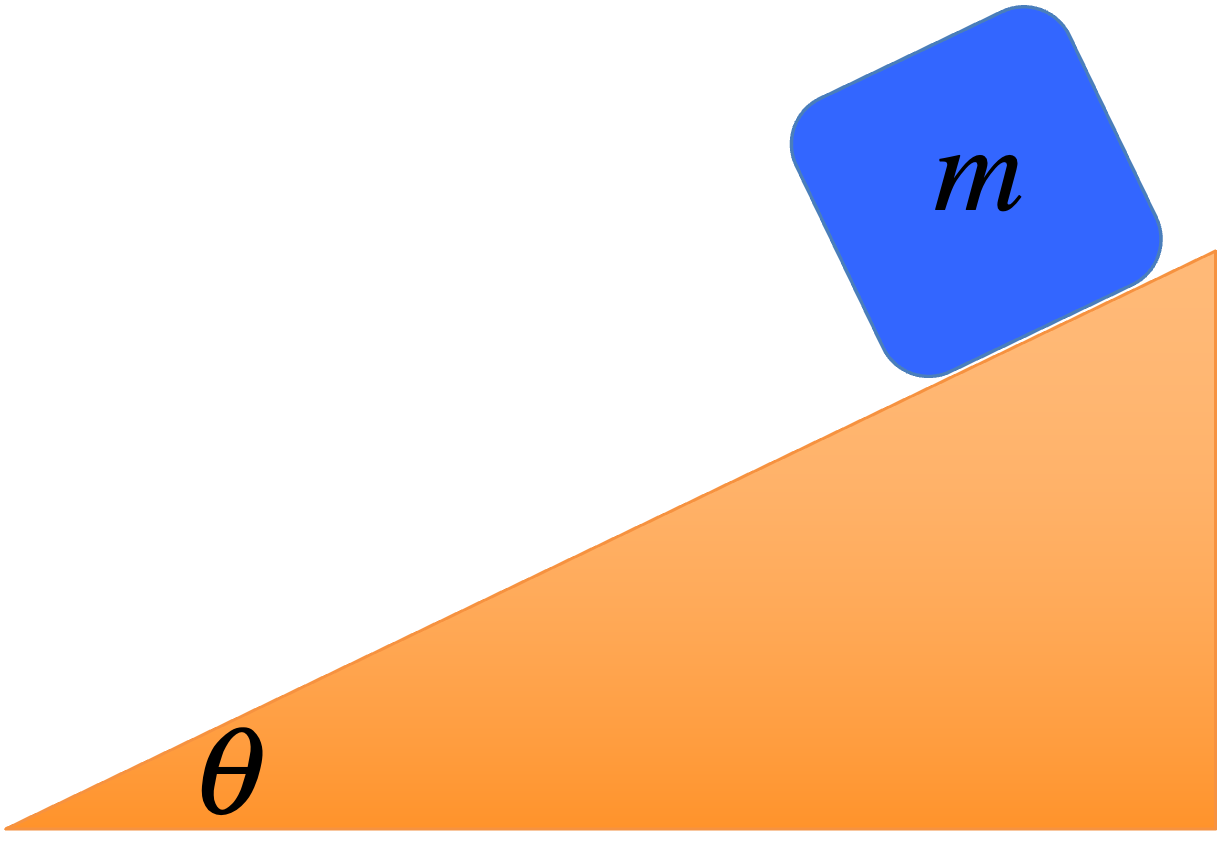
A block of mass $m$ is released on a frictionless incline at angle $\theta$.
Given:
$m = ~m~ kg$.
$\theta = ~theta~ ^\circ$.
Draw the force diagram. (No online submission.)
Find the components of the gravitational force $F_{g \parallel}$ and $F_{g \perp}$ along the parallel and perpendicular directions. Enter the magnitudes only.
Find the normal force $F_n$ on the block.
Find the magnitude of the acceleration $a_\parallel$.
You must draw the free body diagram to receive any credits for this problem in a test.
Hint:
Separate the forces into two groups: the parallel and perpendicular directions. Each group can be analyzed separately.
Use $a_{\perp} = 0m/s^2$ to find $F_n$.
$F_{g \parallel}$ and $T$ will give $a_{\parallel}$.
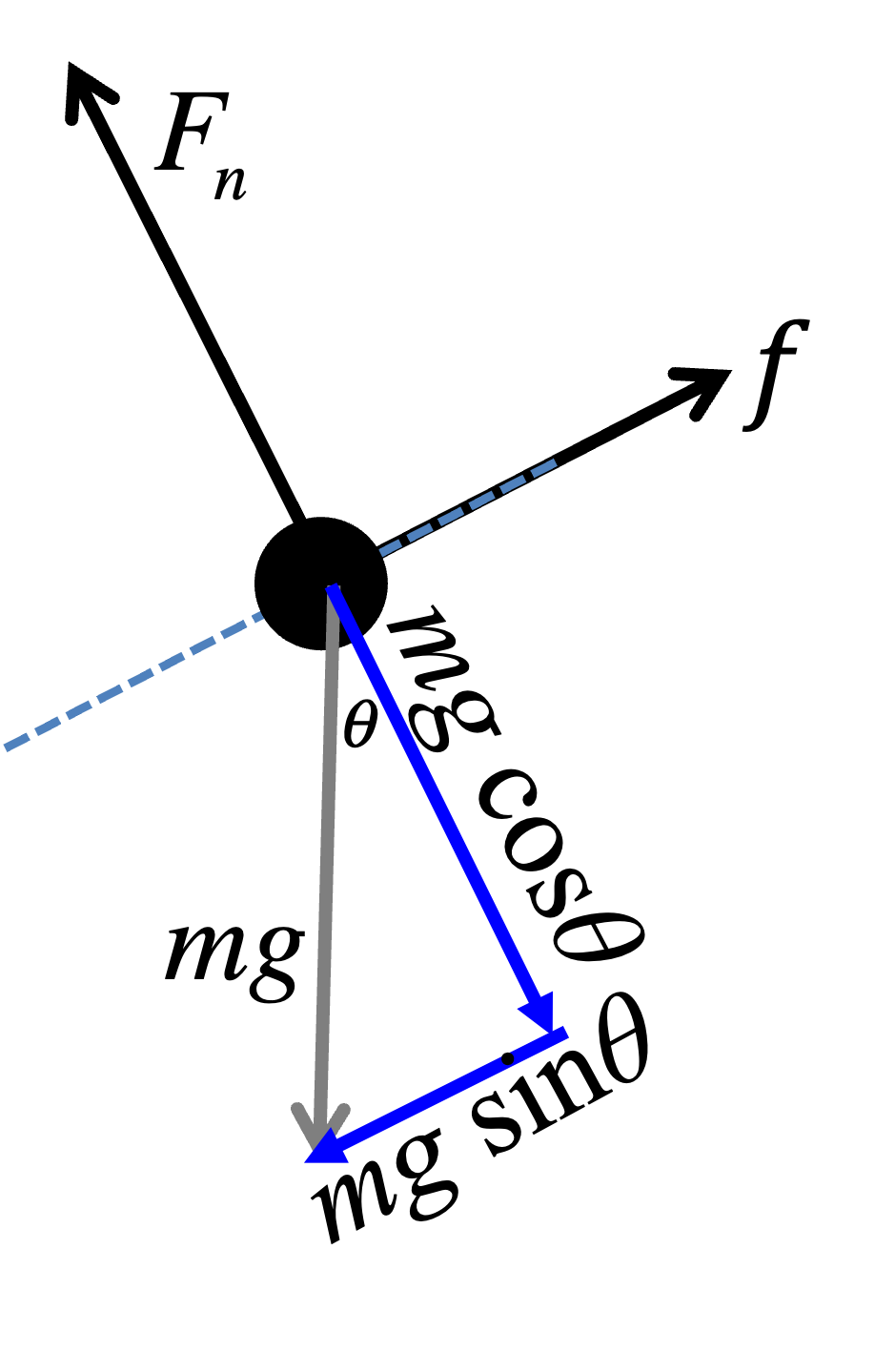
The force diagram. Draw this diagram in homework, quizzes, and exams.Replacing the weight with its two components.Showing only the parallel components. Direction of acceleration also indicated in the figure (not to scale).
Solution
Decompose the weight
The magnitude of the parallel component of $F_g$:
$$
\begin{eqnarray}
F_{g\parallel} &=& mg \sin \theta \\
&=& (~m~ kg)(9.8 m/s^2) \sin (~theta~^\circ) \\
&=& [[return sf_latex(namespace_force_02.weight_parallel)]] N
\end{eqnarray}
$$
The magnitude of the perpendicular component of $F_g$:
$$
\begin{eqnarray}
F_{g\perp} &=& mg \cos \theta \\
&=& (~m~ kg)(9.8 m/s^2) \cos (~theta~^\circ) \\
&=& [[return sf_latex(namespace_force_02.weight_perpendicular)]] N
\end{eqnarray}
$$
Normal force
Focus on the perpendicular direction:
Only two forces: $F_n$ and $F_{g\perp}$.
No motion along the perpendicular direction, therefore $a_\perp = 0m/s^2$
Along the parallel direction, the only force is $F_{g\parallel} = [[return sf_latex(namespace_force_02.weight_parallel)]] N$ pointing down the incline.
Use $F = ma$:
$$
\begin{eqnarray}
F_{g\parallel} &=& m a_\parallel \\
\Rightarrow a_\parallel &=& \frac{F_{g\parallel}}{m} \\
&=& \frac{ [[return sf_latex(namespace_force_02.weight_parallel)]] N}{~m~ kg} \\
&=& [[return sf_latex(Math.abs(namespace_force_02.a))]] m/s^2
\end{eqnarray}
$$
Note that $a_\parallel$ is actually independent of the mass $m$. If you following the calculation without putting in a value for $m$, you will see that it cancels out in the end.
The block may or may not move along the direction of $T$.
A block of mass $m$ is released on a frictionless incline at angle $\theta$, tied to a rope with tension $T$ pulling on the block in the [[return (~tension~>0)? "uphill":"downhill"]] direction. The direction of acceleration depends on the strength of $T$ compared with the pull of gravity.
Given:
$m = ~m~ kg$.
$T = [[return Math.abs(~tension~)]] N$.
$\theta = ~theta~ ^\circ$.
Draw the force diagram. (No online submission.)
Find the components of the gravitational force $F_{g \parallel}$ and $F_{g \perp}$ along the parallel and perpendicular directions. Enter the magnitudes only.
Find the normal force $F_n$ on the block.
Find the magnitude of the acceleration $a_\parallel$.
Find the direction of the acceleration.
You must draw the free body diagram to receive any credits for this problem in a test.
Hint:
Separate the forces into two groups: the parallel and perpendicular directions. Each group can be analyzed separately.
Use $a_{\perp} = 0m/s^2$ to find $F_n$.
$F_{g \parallel}$ and $T$ will give $a_{\parallel}$.
The force diagram. Draw this diagram in homework, quizzes, and exams.Replacing the weight with its two components.Showing only the parallel components. Direction of acceleration also indicated in the figure (not to scale).
Solution
Decompose the weight
The magnitude of the parallel component of $F_g$:
$$
\begin{eqnarray}
F_{g\parallel} &=& mg \sin \theta \\
&=& (~m~ kg)(9.8 m/s^2) \sin (~theta~^\circ) \\
&=& [[return sf_latex(namespace_force_02.weight_parallel)]] N
\end{eqnarray}
$$
The magnitude of the perpendicular component of $F_g$:
$$
\begin{eqnarray}
F_{g\perp} &=& mg \cos \theta \\
&=& (~m~ kg)(9.8 m/s^2) \cos (~theta~^\circ) \\
&=& [[return sf_latex(namespace_force_02.weight_perpendicular)]] N
\end{eqnarray}
$$
Normal force
Focus on the perpendicular direction:
Only two forces: $F_n$ and $F_{g\perp}$.
No motion along the perpendicular direction, therefore $a_\perp = 0m/s^2$
A block of mass $m$ is sliding down on an incline with coefficient of friction $\mu$ at angle $\theta$.
Given:
$m = ~m~ kg$.
$\mu = ~mu~$.
$\theta = ~theta~ ^\circ$.
Find the components of the gravitational force $F_{g \parallel}$ and $F_{g \perp}$ along the parallel and perpendicular directions. Enter the magnitudes only.
Find the normal force $F_n$ on the block.
Find the magnitude of friction $f$.
Find the magnitude of the acceleration $a_\parallel$.
You must draw the free body diagram to receive any credits for this problem in a test.
Hint:
Separate the forces into two groups: the parallel and perpendicular directions. Each group can be analyzed separately.
Use $a_{\perp} = 0m/s^2$ to find $F_n$.
$f = \mu F_n$.
$F_{g \parallel}$ and $f$ will give $a_{\parallel}$.
The force diagram. Draw this diagram in homework, quizzes, and exams.Replacing the weight with its two components.Showing only the parallel components. Direction of acceleration also indicated in the figure (not to scale).
Solution
Decompose the weight
The magnitude of the parallel component of $F_g$:
$$
\begin{eqnarray}
F_{g\parallel} &=& mg \sin \theta \\
&=& (~m~ kg)(9.8 m/s^2) \sin (~theta~^\circ) \\
&=& [[return sf_latex(namespace_force_02.weight_parallel)]] N
\end{eqnarray}
$$
The magnitude of the perpendicular component of $F_g$:
$$
\begin{eqnarray}
F_{g\perp} &=& mg \cos \theta \\
&=& (~m~ kg)(9.8 m/s^2) \cos (~theta~^\circ) \\
&=& [[return sf_latex(namespace_force_02.weight_perpendicular)]] N
\end{eqnarray}
$$
Normal force
Focus on the perpendicular direction:
Only two forces: $F_n$ and $F_{g\perp}$.
No motion along the perpendicular direction, therefore $a_\perp = 0m/s^2$
$$
\begin{eqnarray}
f &=& \mu F_n \\
&=& (~mu~)([[return sf_latex(namespace_force_02.weight_perpendicular)]] N) \\
&=& [[return sf_latex(namespace_force_02.friction)]] N
\end{eqnarray}
$$
Acceleration
Focus on the parallel direction:
Only two forces: $f = [[return sf_latex(namespace_force_02.friction)]] N$ (up) and $F_{g\parallel} = [[return sf_latex(namespace_force_02.weight_parallel)]] N$ (down).
$f \lt F_{g\parallel}$, so $a_\parallel$ points down the slope.
Use $F_{same} - F_{opposite} = ma$:
$$
\begin{eqnarray}
F_{g\parallel} - f &=& m a_\parallel \\
\Rightarrow a_\parallel &=& \frac{F_{g\parallel} - f}{m} \\
&=& \frac{[[return sf_latex(namespace_force_02.weight_parallel)]] N - [[return sf_latex(namespace_force_02.friction)]] N}{~m~ kg} \\
&=& \frac{[[return sf_latex(Math.abs(namespace_force_02.f_net_parallel))]] N}{~m~ kg} \\
&=& [[return sf_latex(Math.abs(namespace_force_02.a))]] m/s^2
\end{eqnarray}
$$
Note that $a_\parallel$ is actually independent of the mass $m$. If you following the calculation without putting in a value for $m$, you will see that it cancels out in the end.
if (int_count_times_randomized == 0){
return 10;
} else {
return random_min_max_precision(5, 20, 0); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 30;
} else {
return random_min_max_precision(20, 75, 0); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 50;
} else {
return random_min_max_precision(20, 75, 0); //defined in setup_exercise_all.js
}
return (180 - ~theta_1~ - ~theta_2~ > 40);
A mass held by two strings.
A mass $m = ~m~ kg$ is held by two strings with tension $T_1$ and $T_2$ at the angles $\theta_1 = ~theta_1~ ^\circ$ and $\theta_2 = ~theta_2~ ^\circ$ as shown.
Draw the force diagram (no online submission).
By considering the horizontal forces, write $T_1$ as a function of $T_2$. (Symbolic manipulation, no online submission.)
By considering the horizontal forces, write down another equation relating $T_1$ and $T_2$. (Symbolic manipulation, no online submission.)
Hint:
Decompose the forces into the horizontal and vertical components and ensure they cancel out in both directions.
Solution
Force diagram. Note that the length of the arrow represents the magnitude of the tensions, not the length of the strings.
Since the object is at equilibrium, all the forces must cancel out. Geometrically, it means all the force vectors must add up to zero, forming a closed loop as shown, i.e $\vec T_1 + \vec T_2 + \vec W = \vec 0$. You do not have to draw this diagram in the exam, it is included here to give you a deeper understanding.
Exercise - Vertical pulley with two blocks in contact
if (int_count_times_randomized == 0){
return 10;
} else {
return random_min_max_precision(5, 10, 0); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 15;
} else {
return random_min_max_precision(11, 20, 0); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 0.15;
} else {
return random_min_max_precision(0.1, 0.99, 2); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 30;
} else {
return random_min_max_precision(10, 70, 0); //defined in setup_exercise_all.js
}
return (true);
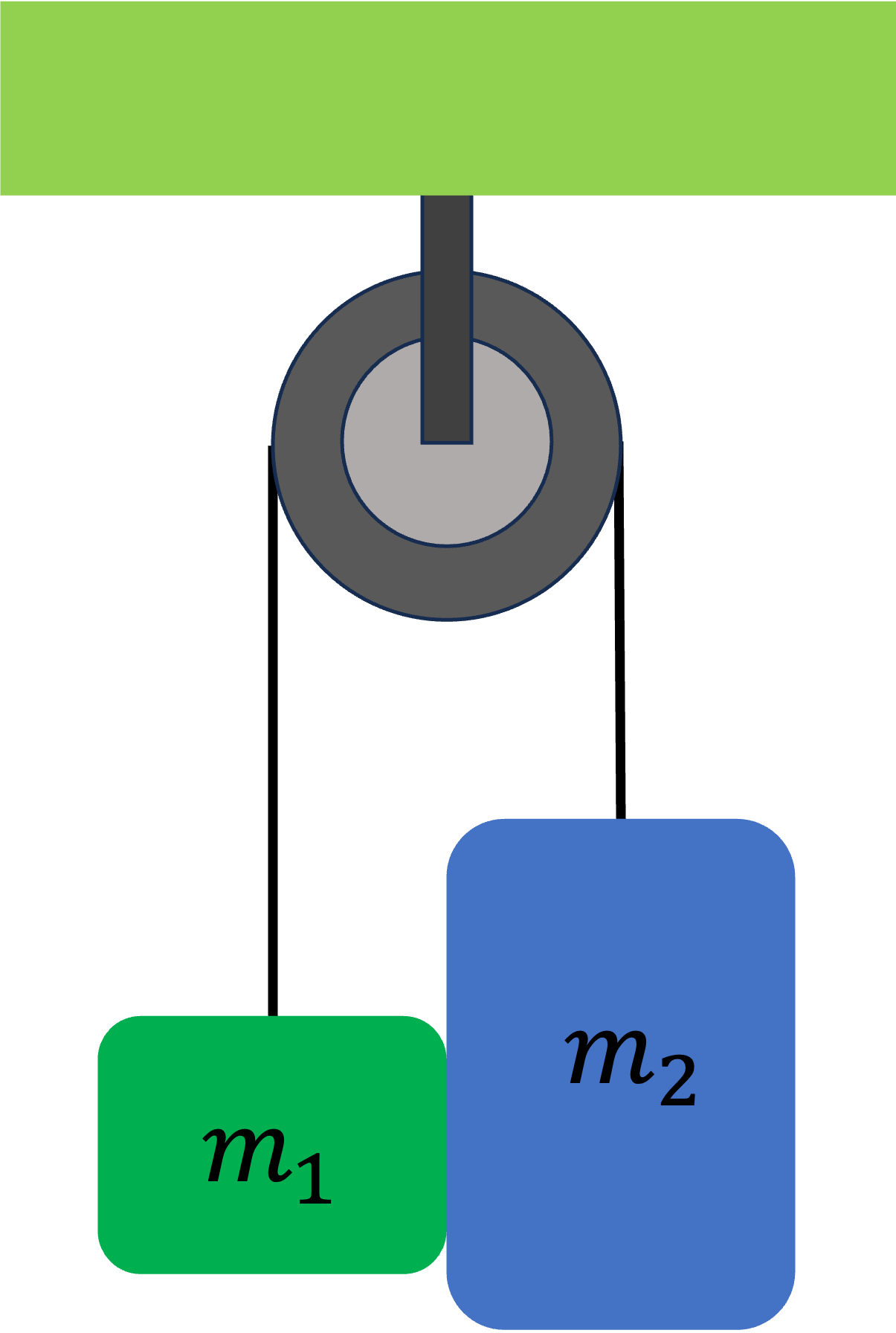
Two blocks connected by a pulley.
$m_1 = ~m_1~ kg$ and $m_2 = ~m_2~ kg$ are connected through a frictionless pulley as shown. The two blocks are in contact, generating friction $f$ between them.
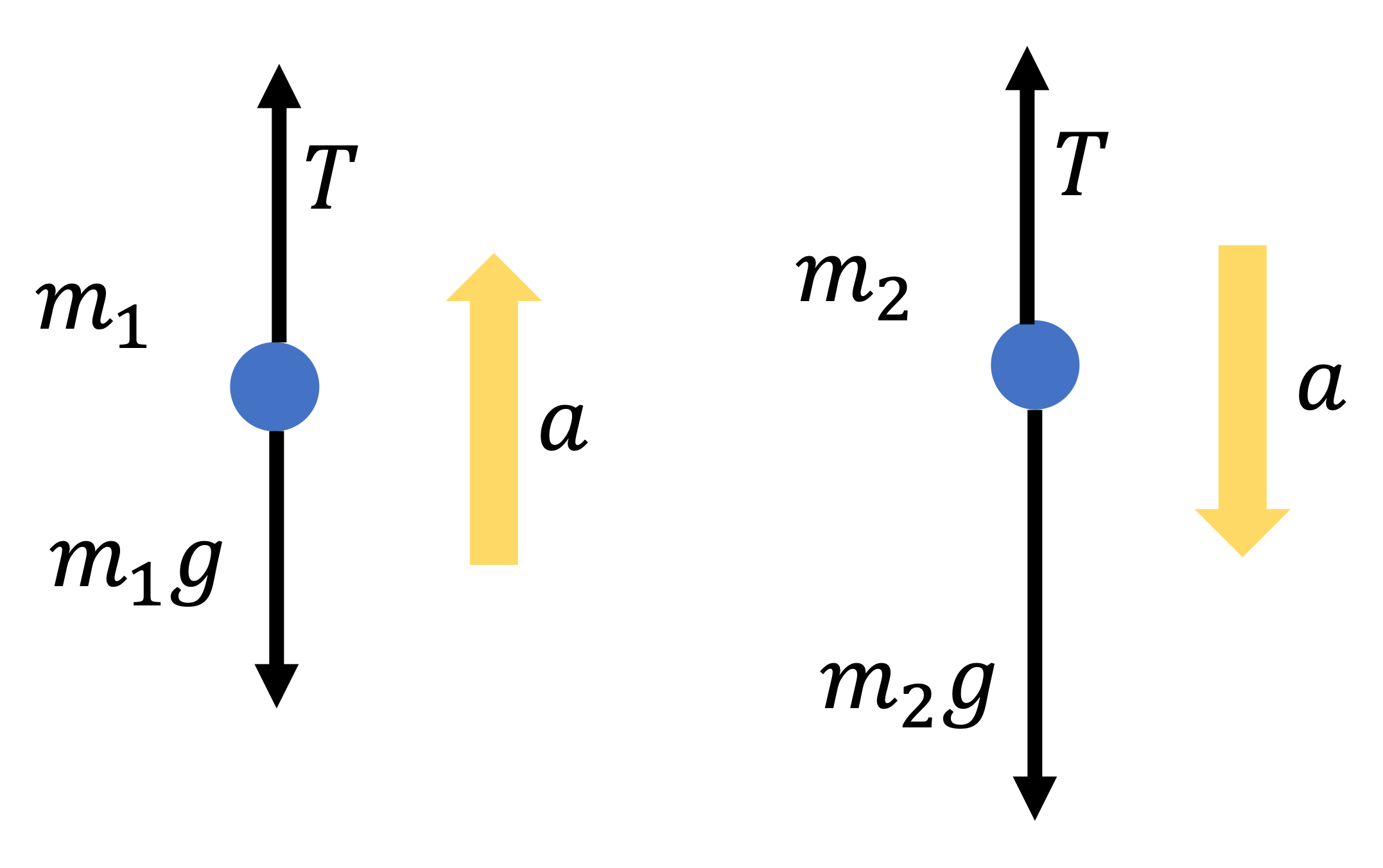
Assume $f = 0N$ for this part.
Draw the force diagrams (no online submission).
Find the magnitude of acceleration of the blocks.
Find the magnitude of the tension in the string.
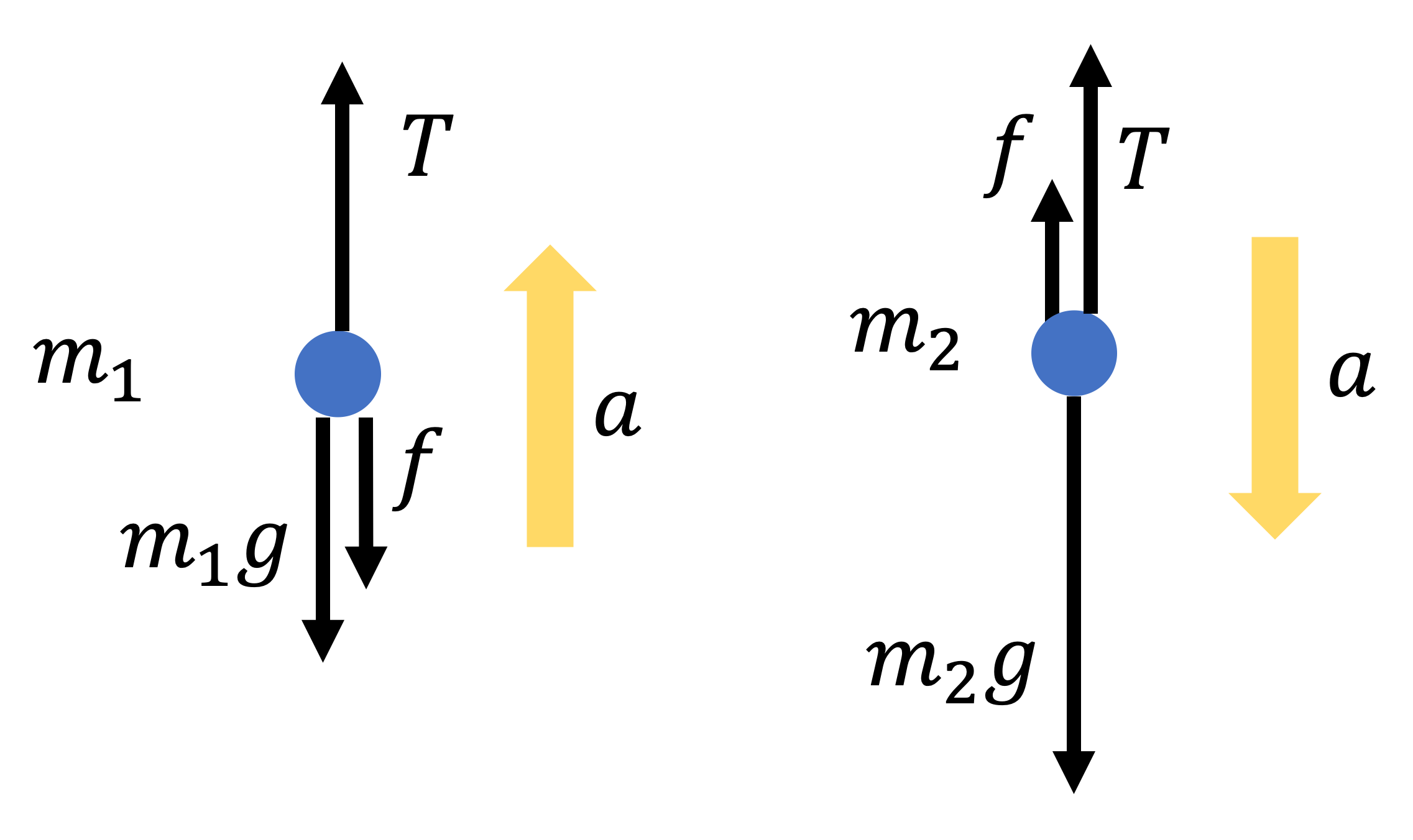
Assume $f \neq 0N$ and the blocks are stationary for this part.
Draw the force diagrams (no online submission).
What is the static friction $f$?
What is the tension?
Suppose the blocks are magnets attracting each other, generating a normal force $F_n = ~F_n~ N$ on their contact surface. If the coefficent of static friction between the blocks is $\mu = ~mu~$, what is the maximum mass difference $\Delta m = m_2 - m_1$ you could choose that would still keep the blocks stationary?
Applying Newton's second law:
$$
\begin{eqnarray}
\left\{ % Comment a closing brace to remove the error warning. }
\begin{array}{rll} % Change to rl if text is no needed.
T - m_1 g &= m_1 a \\
m_2 g - T &= m_2 a
\end{array} % If tag is used instead of text, then it will label the whole set.
\right.
\end{eqnarray}
$$
Adding the equations give:
$$
\begin{eqnarray}
m_2 g - m_1 g &=& m_1 a + m_2 a \\
\Rightarrow (m_2 - m_1 ) g &=& (m_1 + m_2) a \\
\Rightarrow a &=& \frac{m_2 - m_1}{m_1 + m_2} g \\
&=& \frac{~m_2~ kg - ~m_1~ kg}{~m_1~ kg + ~m_2~ kg} (9.8 m/s^2) \\
&=& [[return sf_latex(a)]] m/s^2
\end{eqnarray}
$$
Tension
Substituting back:
$$
\begin{eqnarray}
T - m_1 g &=& m_1 a \\
\Rightarrow T &=& m_1 g + m_1 a \\
&=& m_1 (g + a) \\
&=& (~m_1~ kg) (9.8 m/s^2 + [[return sf_latex(a)]] m/s^2) \\
&=& [[return sf_latex(T)]] N
\end{eqnarray}
$$
With friction
Force diagrams when $f \neq 0$. $a = 0 m/s^2$ if they are stationary.
If they are stationary, all forces must cancel out:
$$
\begin{eqnarray}
\left\{ % Comment a closing brace to remove the error warning. }
\begin{array}{rll} % Change to rl if text is no needed.
T &= m_1 g + f \\
T + f &= m_2 g
\end{array} % If tag is used instead of text, then it will label the whole set.
\right.
\end{eqnarray}
$$
Substituting the first into the second:
$$
\begin{eqnarray}
(m_1 g + f) + f &=& m_2 g \\
\Rightarrow m_1 g + 2f &=& m_2 g \\
\Rightarrow f &=& \frac{1}{2}(m_2 - m_1) g \\
&=& \frac{1}{2}(~m_2~ kg - ~m_1~ kg) (9.8 m/s^2) \\
&=& [[return sf_latex(f)]] N
\end{eqnarray}
$$
Tension
Put back into the first equation:
$$
\begin{eqnarray}
T &=& m_1 g + f \\
&=& (~m_1~ kg) (9.8 m/s^2) + [[return sf_latex(f)]] N \\
&=& [[return sf_latex(T_stationary)]] N
\end{eqnarray}
$$
Alternative approach for $T$ when stationary
If you did not put in the numerical value for $f = \frac{1}{2}(m_2 - m_1) g$ right away, you will see that:
$$
\begin{eqnarray}
T &=& m_1 g + f \\
&=& m_1 g + \frac{1}{2}(m_2 - m_1) g \\
&=& \frac{1}{2}(m_1 + m_2) g \\
&=& \frac{\text{total weight}}{2}
\end{eqnarray}
$$
which of course gives you the same answer in the end. This equation shows you $T$ is actually just half of the total weight of the two blocks. The reason is that overall, the two blocks are stationary, so the total upward force must be the total weight of the two blocks. Since the string pulls on the blocks upward at two locations (once on each block), total upward force is $2T$. Therefore, $2T = m_1 g + m_2 g \Rightarrow T = \frac{1}{2}(m_1 + m_2) g$.
$\Delta m$
$$
\begin{eqnarray}
f &=& \frac{1}{2}(m_2 - m_1) g \leq \mu F_n \\
\Rightarrow \Delta m &=& m_2 - m_1 \leq \frac{2 \mu F_n}{g} \\
&=& \frac{2 (~mu~) (~F_n~ N)}{9.8 m/s^2} \\
&=& [[return sf_latex(Delta_m)]] kg
\end{eqnarray}
$$
When $f = 0 N$ $a = $
return sf_math(a)
5%
$m/s^2$ $T = $
return sf_math(T)
5%
$N$ When $f \neq 0 N$ $f = $
return sf_math(f)
5%
$N$ $T = $
return sf_math(T_stationary)
5%
$N$ $\Delta m = $
return sf_math(Delta_m)
5%
$kg$
force || friction
Exercise - Moving two stacked blocks with friction
if (int_count_times_randomized == 0){
return 2;
} else {
return random_min_max_precision(2, 6, 0); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 10;
} else {
return random_min_max_precision(7, 20, 0); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 30;
} else {
return random_min_max_precision(20, 80, 0); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 0.15;
} else {
return random_min_max_precision(0.1, 0.3, 2); //defined in setup_exercise_all.js
}
return (true);
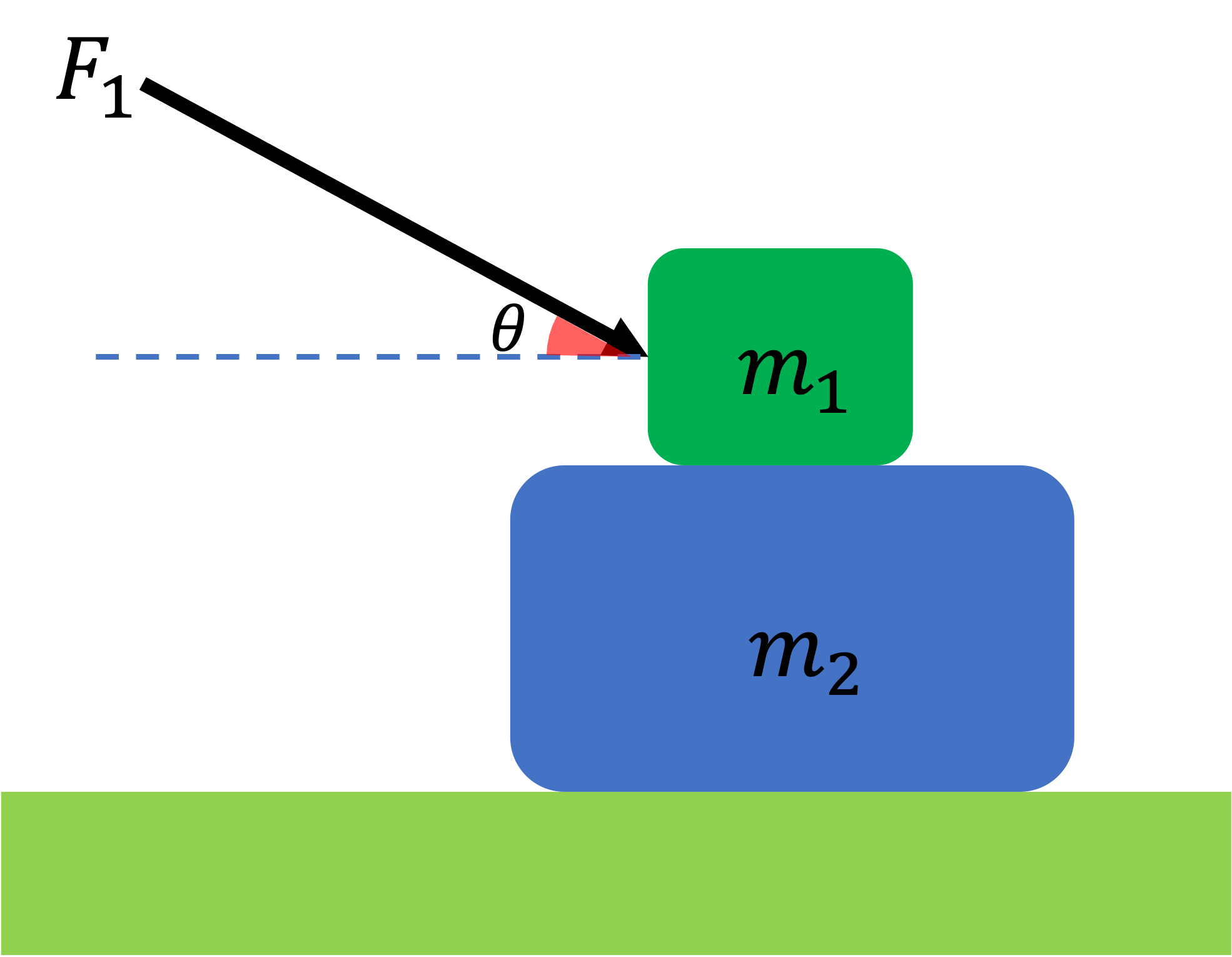
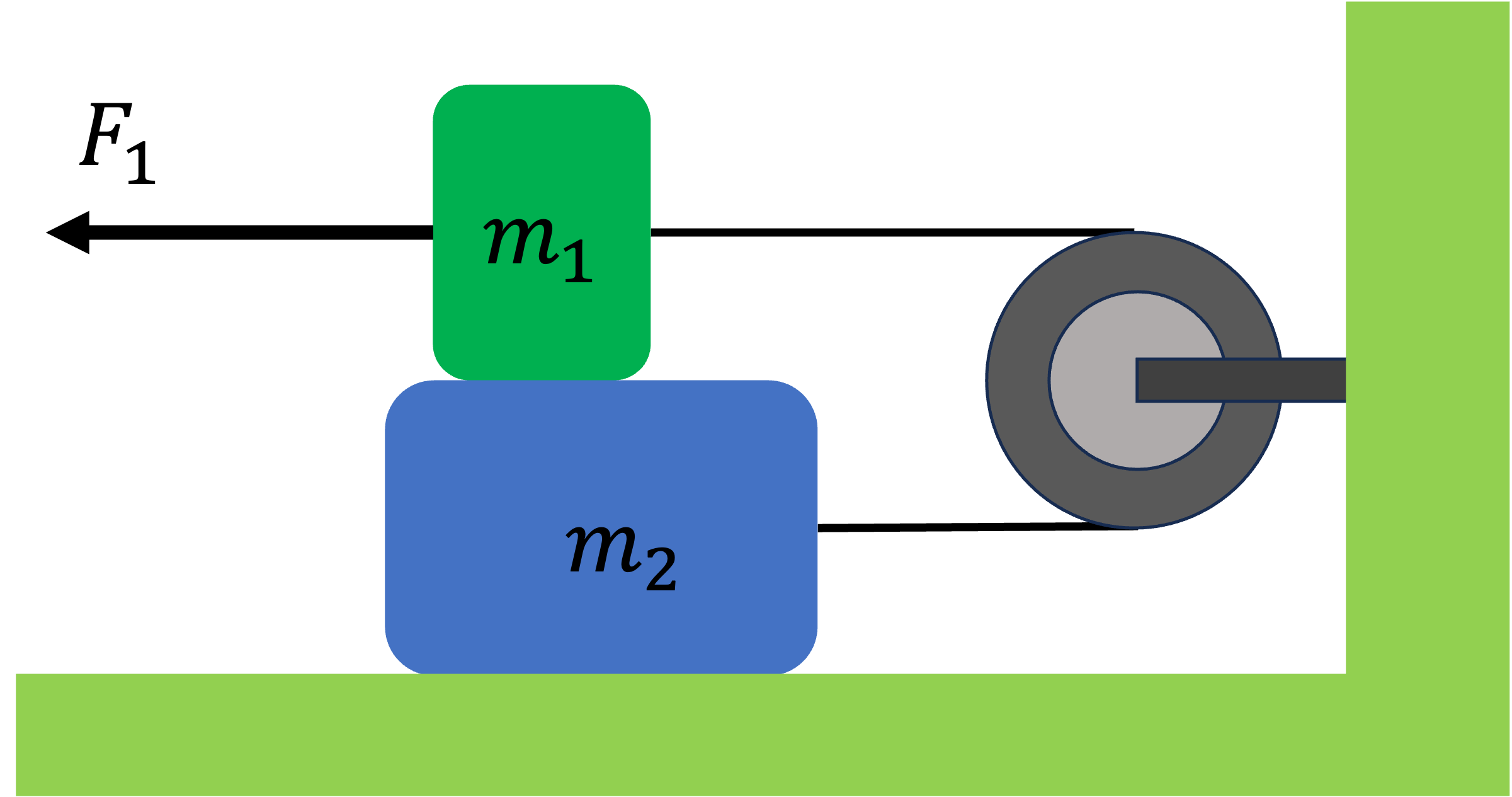
Two blocks pushed by a force on a frictionless surface.
$m_1$ is stacked on top of $m_2$, which is on a frictionless surface. The coefficient of static friction between the two blocks is $\mu$, generating friction $f$. A force $F_1$ is pushing on $m_1$ at angle $\theta$ below the horizontal as shown in the figure causing the blocks to accelerate to the right, with $m_1$ staying in place above $m_2$ without slipping. In terms of the given variables, answer the following questions.
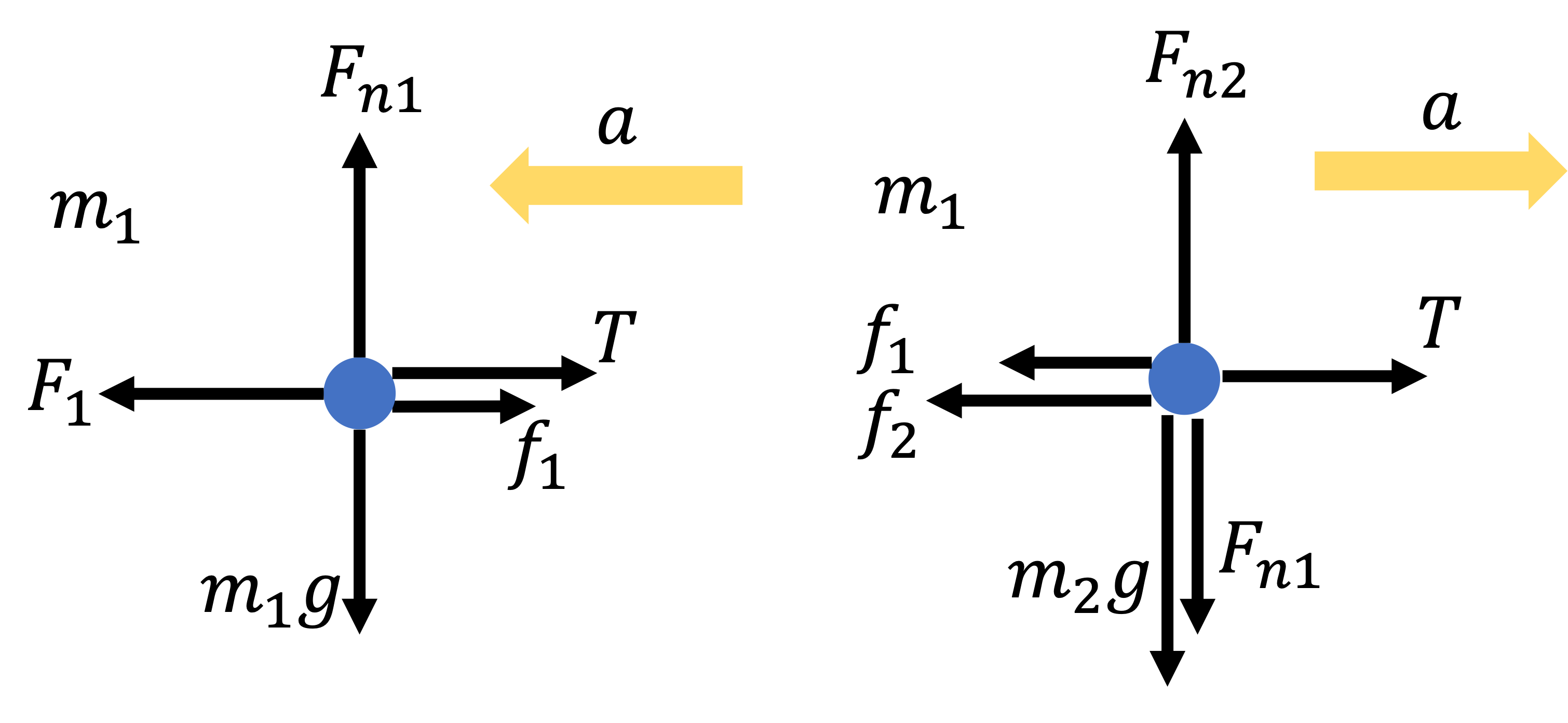
Draw the force diagrams for $m_1$ and $m_2$ (no online submission).
Find the normal force $F_{n1}$ on $m_1$. (Symbolic manipulation, no online submission.)
Find the normal force $F_{n2}$ on $m_2$. (Symbolic manipulation, no online submission.)
Apply Newton's second law to the horizontal forces of $m_1$ and $m_2$ separately to get two equations. Your answer should contain $f$ but not $\mu$. (Symbolic manipulation, no online submission.)
Solve the two equations for $a$ and $f$. (Symbolic manipulation, no online submission.)
Use the relation between the static friction $f$ and $\mu$ to find the maximum value fo $F_1$ that could be applied without causing $m_1$ to slip. (Symbolic manipulation, no online submission.)
If $m_1 = ~m_1~ kg$, $m_2 = ~m_2~ kg$, $\theta = ~theta_in_degree~ ^\circ$, $\mu = ~mu~$, calculate $F_1$, $F_{n1}$, $F_{n2}$, $a$ and $f$ for the maximum $F_1$ above.
Hint:
$f \leq \mu F_n$. Solve for $f$ and $F_n$ and use this inequality to find $F_1$.
Solution
Force diagrams.
$F_{n1}$
The vertical forces on $m_1$ must cancel:
$$
\begin{eqnarray}
F_{up} &=& F_{down} \\
F_{n1} &=& m_1 g + F_1 \sin \theta
\end{eqnarray}
$$
$F_{n2}$
The vertical forces on $m_2$ must also cancel:
$$
\begin{eqnarray}
F_{up} &=& F_{down} \\
F_{n2} &=& m_2 g + F_{n1} \\
&=& m_2 g + m_1 g + F_1 \sin \theta \\
&=& (m_1 + m_2) g + F_1 \sin \theta
\end{eqnarray}
$$
Newton second law
Applying Newton second law to the horizontal direction of $m_1$ and $m_2$ separately:
$$
\begin{eqnarray}
\left\{ % Comment a closing brace to remove the error warning. }
\begin{array}{rl} % Change to rl if text is no needed.
F_1 \cos \theta - f &= m_1 a \\
f &= m_2 a
\end{array} % If tag is used instead of text, then it will label the whole set.
\right.
\end{eqnarray}
$$
$a$ and $f$
Adding the equations give:
$$
\begin{eqnarray}
F_1 \cos \theta &=& (m_1 + m_2) a \\
\Rightarrow a &=& \frac{F_1 \cos \theta}{m_1 + m_2}
\end{eqnarray}
$$
Putting this back into $f$ gives:
$$
\begin{eqnarray}
f &=& m_2 a = m_2 (\frac{F_1 \cos \theta}{m_1 + m_2}) \\
&=& \frac{m_2}{m_1 + m_2} F_1 \cos \theta
\end{eqnarray}
$$
$$
\begin{eqnarray}
F_1 &=& \mu m_1 g (\frac{m_1 + m_2}{m_2})(\frac{1}{\cos \theta - \mu \sin \theta}) \\
&=& [[return sf_latex(F_1)]] N
\end{eqnarray}
$$
$$
\begin{eqnarray}
F_{n1} &=& m_1 g + F_1 \sin \theta \\
&=& [[return sf_latex(F_n1)]] N
\end{eqnarray}
$$
$$
\begin{eqnarray}
F_{n2} &=& m_2 g + F_{n1} \\
&=& [[return sf_latex(F_n2)]] N
\end{eqnarray}
$$
$$
\begin{eqnarray}
a &=& \frac{F_1 \cos \theta}{m_1 + m_2} \\
&=& [[return sf_latex(a)]] m/s^2
\end{eqnarray}
$$
$$
\begin{eqnarray}
f &=& m_2 a \\
&=& [[return sf_latex(f)]] N
\end{eqnarray}
$$
$F_1 = $
return sf_math(F_1)
5%
$N$ $F_{n1} = $
return sf_math(F_n1)
5%
$N$ $F_{n2} = $
return sf_math(F_n2)
5%
$N$ $a = $
return sf_math(a)
5%
$m/s^2$ $f = $
return sf_math(f)
5%
$N$
force || friction
Exercise - Horizontal pulley with two blocks in contact
if (int_count_times_randomized == 0){
return 10;
} else {
return random_min_max_precision(5, 10, 0); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 15;
} else {
return random_min_max_precision(11, 20, 0); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 0.15;
} else {
return random_min_max_precision(0.1, 0.99, 2); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 0.2;
} else {
return random_min_max_precision(0.1, 0.99, 2); //defined in setup_exercise_all.js
}
return (true);
Two blocks connected by a pulley.
$m_1 = ~m_1~ kg$ and $m_2 = ~m_2~ kg$ are connected through a frictionless pulley as shown. A force $F_1$ is applied on $m_1$ pulling it to the left. The coefficent of kinetic friction between the blocks is $~mu_1~$ and the coefficent of kinetic friction between $m_2$ and the ground is $~mu_2~$.
Draw the force diagrams. Label the friction on the blocks $f_1$ and $f_2$ (no online submission).
Suppose $m_1$ is currently accelerating to the left at the rate $a$. Write $F_1$ and $T$ symbolically in terms of $a$, $f_1$, $f_2$ and the masses without substituting any of the numerical values (no online submission).
Calculate the normal forces $F_{n1}$ and $F_{n2}$ acting on $m_1$ and $m_2$.
Calculate the friction $f_1$ and $f_2$.
Find $F_1$ and $T$ if $m_1$ is sliding to the left at constant velocity.
Applying Newton's second law to the horizontal forces on the two masses:
$$
\begin{eqnarray}
\left\{ % Comment a closing brace to remove the error warning. }
\begin{array}{rll} % Change to rl if text is no needed.
F_1 - T - f_1 &= m_1 a \\
T - f_1 - f_2 &= m_2 a
\end{array} % If tag is used instead of text, then it will label the whole set.
\right. \\
\Rightarrow
\left\{ % Comment a closing brace to remove the error warning. }
\begin{array}{rll} % Change to rl if text is no needed.
F_1 &= m_1 a + T + f_1 \\
T &= m_2 a + f_1 + f_2
\end{array} % If tag is used instead of text, then it will label the whole set.
\right.
\end{eqnarray}
$$
Put the second equation into the first equation:
$$
\begin{eqnarray}
F_1 &=& m_1 a + (m_2 a + f_1 + f_2) + f_1 \\
&=& (m_1 + m_2)a + 2f_1 + f_2 \tag{1}
\end{eqnarray}
$$
Normal force
The vertical forces on $m_1$ must cancel:
$$
\begin{eqnarray}
F_{n1} &=& m_1 g = (~m_1~ kg) (9.8 m/s^2) \\
&=& [[return sf_latex(F_n1)]] N
\end{eqnarray}
$$
The vertical forces on $m_2$ must also cancel:
$$
\begin{eqnarray}
F_{n2} &=& m_2 g + F_{n1} = m_2 g + m_1 g \\
&=& (m_1 + m_2) g \\
&=& (~m_1~ kg + ~m_2~ kg) (9.8 m/s^2) \\
&=& [[return sf_latex(F_n2)]] N
\end{eqnarray}
$$
Without air resistance, we could use the kinematic equations for constant $a$ we learned in chapter 2.
$s_0 = 0m$
$v_0 = 0 m/s$
$s = $ missing
$v = ?$ (because the highest poing is the turning point)
$a = -g = -9.8 m/s^2$
$t = ~t~ s$
Using the $s$-equation from chapter 2, we have:
$$
\begin{eqnarray}
v &=& v_0 + a t \\
&=& -g t \\
&=& - (9.8) (~t~) \\
&=& [[return sf_latex(v_1)]] m/s
\end{eqnarray}
$$
With air resistance $f = b v$
When air resistance is present, $a$ is no longer constant, so we have to use calculus. Choosing the upward direction to be the positive direction:
$$
\begin{eqnarray}
F &=& ma \\
\Rightarrow - mg - b v &=& m \frac{d v}{dt} \\
\Rightarrow 1 &=& -\frac{m}{bv + mg} \frac{d v}{dt}
\end{eqnarray}
$$
Integrate over $t$:
$$
\begin{eqnarray}
\int_0^t dt &=& -\int_0^v \frac{m}{bv + mg} dv \\
\Rightarrow t &=& -\frac{1}{g} \int_0^v \frac{1}{\frac{b}{mg}v + 1} dv \\
&=& -\frac{1}{g} (\frac{mg}{b}) \int_0^v \frac{1}{\frac{b}{mg}v + 1} d(\frac{b}{mg} v) \\
&=& -\frac{m}{b} \ln (1 + \frac{b v}{mg}) \\
\Rightarrow -\frac{b}{m} t &=& \ln (1 + \frac{b v}{mg}) \\
\Rightarrow 1 + \frac{b v}{mg} &=& e^{-\frac{b}{m} t} \\
\Rightarrow \frac{b v}{mg} &=& e^{-\frac{b}{m} t} - 1 \\
\Rightarrow v &=& \frac{mg}{b} (e^{-\frac{b}{m} t} - 1) \\
&=& \frac{(~m~)(9.8)}{~b~} (e^{-\frac{~b~}{~m~} (~t~)} - 1) \\
&=& [[return sf_latex(v_2)]] m/s
\end{eqnarray}
$$
Terminal speed
Terminal speed is achieved when friction is strong enough to cancel the gravitational force, leading to $a=0 m/s^2$. Therefore:
$$
\begin{eqnarray}
- mg - b v &=& 0 \\
\Rightarrow v &=& -\frac{mg}{b} \\
\Rightarrow |v| &=& \frac{mg}{b} \\
&=& \frac{(~m~)(9.8)}{~b~} \\
&=& [[return sf_latex(v_terminal_2)]] m/s
\end{eqnarray}
$$
Without air resistance: $v = $
return sf_math(v_1)
5%
$m/s$ With air resistance $f = b v$: $v = $
return sf_math(v_2)
5%
$m/s$ Terminal speed =
return sf_math(v_terminal_2)
5%
$m/s$
force || friction
Exercise - Maximum height with air resistance
return 0.01;
return 0.2;
if (int_count_times_randomized == 0){
return 100;
} else {
return random_min_max_precision(50, 150, 0); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 10;
} else {
return random_min_max_precision(5, 50, 0); //defined in setup_exercise_all.js
}
return (true);
A $~m~ kg$ ball is shot upward at $~v_0~ m/s^2$.
If there is no air resistance:
Find the maximum height of the ball.
Find the time the ball reaches the maximum height.
If the air resistance (i.e. the drag) is given by $f = -k v^2$, where $k = ~k~ kg/m$:
Find the maximum height of the ball.
Find the time the ball reaches the maximum height. You may use $\int \frac{dx}{x^2 + 1} = \tan^{-1} x$ in evaluating the integral.
Use the limits $\ln (1 + x) \approx x - \frac{x^2}{2}$ and $\tan^{-1} x \approx x - \frac{x^3}{3}$ when $x \rightarrow 0$ to show that when $k \rightarrow 0$ you get back the same answer as when there is no air resistance and also identify the next order correction symbolically (no online submission).
If the air resistance is given by $f = -b v$, where $b = ~b~ kg/s$:
Find the maximum height of the ball.
Find the time the ball reaches the maximum height.
Use the limits $\ln (1 + x) \approx x - \frac{x^2}{2}$ when $x \rightarrow 0$ to show that when $b \rightarrow 0$ you get back the same answer as when there is no air resistance and also identify the next order correction symbolically (no online submission).
Use the $t$-equation from the kinematic equations in chapter 2.
Use calculus to find $s$ and $t$.
$a = \frac{d v}{dt} = v \frac{d v}{ds}$
Solution
Without air resistance
$s$
Without air resistance, we could use the kinematic equations for constant $a$ we learned in chapter 2.
$s_0 = 0m$
$v_0 = ~v_0~ m/s$
$s = ?$
$v = 0 m/s$ (because the highest poing is the turning point)
$a = -g = -9.8 m/s^2$
$t = $ missing
Using the $t$-equation from chapter 2, we have:
$$
\begin{eqnarray}
v^2 &=& v_0^2 + 2 a (s - s_0) \\
\Rightarrow 0 &=& v_0^2 + 2 a s \\
\Rightarrow s &=& -\frac{v_0^2}{2 a} \\
&=& -\frac{v_0^2}{2 (-g)} = \frac{v_0^2}{2 g} \\
&=& \frac{(~v_0~ m/s^2)^2}{2 (9.8 m/s^2)} \\
&=& [[return sf_latex(s_1)]] m
\end{eqnarray}
$$
$t$
$s_0 = 0m$
$v_0 = ~v_0~ m/s$
$s = $ missing
$v = 0 m/s$ (because the highest poing is the turning point)
$a = -g = -9.8 m/s^2$
$t = ?$
Using the $s$-equation from chapter 2:
$$
\begin{eqnarray}
v &=& v_0 + a t = v_0 - g t \\
\Rightarrow t &=& \frac{v_0}{g} = \frac{~v_0~ m/s}{9.8 m/s^2} \\
&=& [[return sf_latex(t_1)]] s
\end{eqnarray}
$$
With air resistance $f = k v^2$
$s$
When air resistance is present, $a$ is no longer constant, so we have to use calculus. Choosing the upward direction to be the positive direction:
$$
\begin{eqnarray}
F &=& ma \\
\Rightarrow - mg - k v^2 &=& m \frac{d v}{dt}
\end{eqnarray}
$$
We are not interested in $t$, so we need to remove $t$ from $\frac{d v}{dt}$ using the same trick we learned in chapter 2:
$$
\begin{eqnarray}
\frac{d v}{dt} &=& \frac{d v}{ds} \frac{d s}{dt} \\
&=& v \frac{d v}{ds}
\end{eqnarray}
$$
Put back into the previous equation, and integrate over $s$ from $s=0$ to the maximum height (where $v=0$):
$$
\begin{eqnarray}
F &=& ma \\
\Rightarrow - mg - k v^2 &=& m v \frac{d v}{ds} \\
\Rightarrow 1 &=& -\frac{mv}{k v^2 + mg} \frac{d v}{ds} \\
\Rightarrow \int_0^s ds &=& -\int_{v_0}^0 \frac{mv}{k v^2 + mg} dv \\
\Rightarrow s &=& \frac{m}{2}\int_0^{v_0} \frac{1}{k v^2 + mg} d(v^2) \qquad \text{because $d(v^2) = 2 v dv$} \\
&=& \frac{m}{2k}\int_0^{v_0} \frac{1}{k v^2 + mg} d(kv^2) \\
&=& \frac{m}{2k}\int_0^{v_0} \frac{1}{k v^2 + mg} d(kv^2 + mg) \\
&=& \frac{m}{2k} \ln (k v^2 + mg) \Bigg|_0^{v_0} \qquad \text{recall $\int dx = \ln x$} \\
&=& \frac{m}{2k} \ln \frac{k v_0^2 + mg}{mg} \qquad \text{recall $\ln b - \ln a = \ln \frac{b}{a}$} \\
&=& \frac{m}{2k} \ln (1 + \frac{k v_0^2}{mg} ) \\
&=& \frac{~m~}{2 (~k~)} \ln (1 + \frac{~k~ (~v_0~)^2}{(~m~)(9.8)} ) \\
&=& [[return sf_latex(s_2)]] m
\end{eqnarray}
$$
$t$
Again starting from Newton's second law:
$$
\begin{eqnarray}
F &=& ma \\
\Rightarrow - mg - k v^2 &=& m \frac{d v}{dt} \\
\Rightarrow 1 &=& - \frac{m}{k v^2 + mg} \frac{d v}{dt}
\end{eqnarray}
$$
This time we integrate both sides w.r.t. directly:
$$
\begin{eqnarray}
\int_0^t dt &=& - \int_{v_0}^0 \frac{m}{k v^2 + mg} dv \\
\Rightarrow t &=& - \frac{m}{mg} \int_{v_0}^0 \frac{1}{\frac{k}{mg} v^2 + 1} dv \\
&=& \frac{1}{g} \int_0^{v_0} \frac{1}{(\sqrt{\frac{k}{mg}} v)^2 + 1} dv \\
&=& \frac{1}{g} \sqrt{\frac{mg}{k}} \int_0^{v_0} \frac{1}{(\sqrt{\frac{k}{mg}} v)^2 + 1} d(\sqrt{\frac{k}{mg}} v) \\
&=& \sqrt{\frac{m}{gk}} \tan^{-1} (\sqrt{\frac{k}{mg}} v) \Bigg|_0^{v_0} \\
&=& \sqrt{\frac{m}{gk}} \tan^{-1} (\sqrt{\frac{k}{mg}} v_0) \\
&=& \sqrt{\frac{~m~}{(9.8) (~k~) }} \tan^{-1} (\sqrt{\frac{~k~}{(~m~)(9.8)}} (~v_0~)) \\
&=& [[return sf_latex(t_2)]] s
\end{eqnarray}
$$
Limits
$$
\begin{eqnarray}
s &=& \frac{m}{2k} \ln (1 + \frac{k v_0^2}{mg} ) \\
&\approx & \frac{m}{2k} (\frac{k v_0^2}{mg} - \frac{1}{2}(\frac{k v_0^2}{mg})^2) \\
&=& \frac{v_0^2}{g} - \frac{k v_0^4}{2 mg^2}
\end{eqnarray}
$$
The first term is the same as the case of no air resistance.
$$
\begin{eqnarray}
t &=& \sqrt{\frac{m}{gk}} \tan^{-1} (\sqrt{\frac{k}{mg}} v_0) \\
&=& \sqrt{\frac{m}{gk}} (\sqrt{\frac{k}{mg}} v_0 - \frac{1}{3}(\sqrt{\frac{k}{mg}} v_0)^3) \\
&=& \frac{v_0}{g} - \frac{kv_0^3}{3 mg^2}
\end{eqnarray}
$$
The first term is the same as the case of no air resistance.
Additional comments
You don't need to learn this for the exam, but if we integrate $t$ to a final $v \neq 0$, we would have gotten:
$$
\begin{eqnarray}
t &=& \sqrt{\frac{m}{gk}} \bigg(\tan^{-1} (\sqrt{\frac{k}{mg}} v_0) - \tan^{-1} (\sqrt{\frac{k}{mg}} v) \bigg) \\
&=& T - \sqrt{\frac{m}{gk}} \tan^{-1} (\sqrt{\frac{k}{mg}} v) \qquad \text{where $T = \sqrt{\frac{m}{g k}} \tan^{-1} (\sqrt{\frac{g k}{m}} v_0) $} \\
\Rightarrow v &=& \sqrt{\frac{mg}{k}} \tan \bigg( \sqrt{\frac{g k}{m}} (T - t) \bigg)
\end{eqnarray}
$$
This could be integrated to find $s = \int v dt$ using $\int \tan \theta = - \ln \cos \theta$. If you do, you will get the same result for $s$ as before.
With air resistance $f = b v$
$s$
Similar to before:
$$
\begin{eqnarray}
F &=& ma \\
\Rightarrow - mg - b v &=& m \frac{d v}{dt} = m \frac{d v}{ds} \frac{d s}{dt} \\
\Rightarrow - mg - b v &=& m v \frac{d v}{ds} \\
\Rightarrow 1 &=& -\frac{m v}{bv + mg} \frac{d v}{ds}
\end{eqnarray}
$$
Integrate over $s$ from $s=0$ to the maximum height (where $v=0$):
$$
\begin{eqnarray}
\int_0^s ds &=& -\int_{v_0}^0 \frac{m v}{bv + mg} dv \\
\Rightarrow s &=& \frac{m}{b} \int_0^{v_0} \frac{b v}{bv + mg} dv \\
&=& \frac{m}{b} \int_0^{v_0} \frac{b v + mg - mg}{bv + mg} dv \\
&=& \frac{m}{b} \int_0^{v_0} (1 - \frac{mg}{bv + mg}) dv \\
&=& \frac{m}{b} \int_0^{v_0} dv - \frac{m}{b} \int_0^{v_0} \frac{1}{\frac{b}{mg}v + 1} dv \\
&=& \frac{m}{b} \int_0^{v_0} dv - \frac{m}{b} (\frac{mg}{b}) \int_0^{v_0} \frac{1}{\frac{b}{mg}v + 1} d(\frac{b}{mg} v) \\
&=& \frac{m}{b} v_0 - \frac{m^2g}{b^2} \ln (1 + \frac{b}{mg}v_0) \\
&=& \frac{m v_0}{b} - \frac{m^2g}{b^2} \ln (1 + \frac{b v_0}{mg}) \\
&=& \frac{(~m~)(~v_0~)}{~b~} - \frac{(~m~)^2 (9.8)}{(~b~)^2} \ln (1 + \frac{~b~ (~v_0~)}{(~m~) (9.8)}) \\
&=& [[return sf_latex(s_3)]] m
\end{eqnarray}
$$
$t$
$$
\begin{eqnarray}
F &=& ma \\
\Rightarrow - mg - b v &=& m \frac{d v}{dt} \\
\Rightarrow 1 &=& -\frac{m}{bv + mg} \frac{d v}{dt}
\end{eqnarray}
$$
Integrate over $t$:
$$
\begin{eqnarray}
\int_0^t dt &=& -\int_{v_0}^0 \frac{m}{bv + mg} dv \\
\Rightarrow t &=& \frac{1}{g} \int_0^{v_0} \frac{1}{\frac{b}{mg}v + 1} dv \\
&=& \frac{1}{g} (\frac{mg}{b}) \int_0^{v_0} \frac{1}{\frac{b}{mg}v + 1} d(\frac{b}{mg} v) \\
&=& \frac{m}{b} \ln (1 + \frac{b v_0}{mg}) \\
&=& \frac{~m~}{~b~} \ln (1 + \frac{~b~ (~v_0~) }{(~m~) (9.8)}) \\
&=& [[return sf_latex(t_3)]] s
\end{eqnarray}
$$
Limit
$$
\begin{eqnarray}
s &=& \frac{m v_0}{b} - \frac{m^2g}{b^2} \ln (1 + \frac{b v_0}{mg}) \\
&\approx& \frac{m v_0}{b} - \frac{m^2g}{b^2} (\frac{b v_0}{mg} - \frac{1}{2}(\frac{b v_0}{mg})^2) \\
&=& \frac{m v_0}{b} - \frac{m v_0}{b} + \frac{v_0^2}{2 g} \\
&=& \frac{v_0^2}{2 g}
\end{eqnarray}
$$
$s$ is the same as without air resistance in the limit $b \rightarrow 0$.
$$
\begin{eqnarray}
t &=& \frac{m}{b} \ln (1 + \frac{b v_0}{mg}) \\
&\approx& \frac{m}{b} (\frac{b v_0}{mg} - \frac{1}{2} (\frac{b v_0}{mg})^2) \\
&=& \frac{v_0}{g} - \frac{b v_0^2}{mg^2}
\end{eqnarray}
$$
The first term is the same as without air resistance.
Without air resistance: $s_{max} = $
return sf_math(s_1)
5%
$m$ $t = $
return sf_math(t_1)
5%
$s$ With air resistance $f = k v^2$: $s_{max} = $
return sf_math(s_2)
5%
$m$ $t = $
return sf_math(t_2)
5%
$s$ With air resistance $f = b v$: $s_{max} = $
return sf_math(s_3)
5%
$m$ $t = $
return sf_math(t_3)
5%
$s$
force || friction
Exercise - A car driving on a curved road
if (int_count_times_randomized == 0){
return 1000;
} else {
return random_min_max_precision(1000, 1800, -2); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 150;
} else {
return random_min_max_precision(100, 400, -1); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 20;
} else {
return random_min_max_precision(10, 40, 0); //defined in setup_exercise_all.js
}
return 1.1;
return 0.2;
return (true);
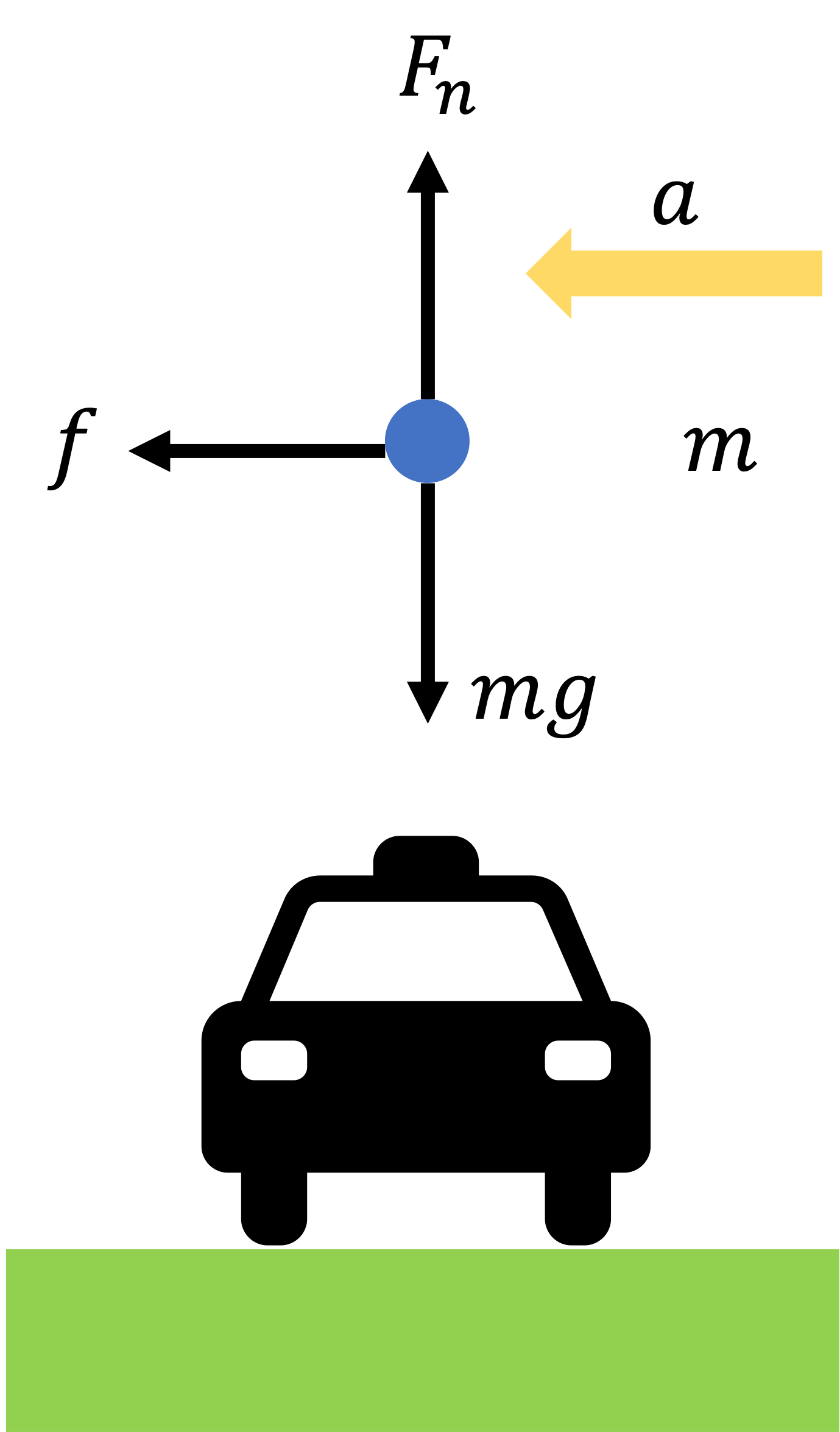
A taxi driving on a curved road.
A $~m~ kg$ car drives on a road that bends with a radius of curvature $r = ~r~ m$ with coefficient of friction $\mu$.
Convert $1mph$ (miles per hour) to $m/s$. Use this to convert all the speed below to $mph$. Hint: $1 \mathrm{mile} \approx 1609 m$.
If the road is flat:
Draw the force diagram. Indicate the direction of acceleration in the diagram. (No online submisson.)
Find the maximum speed $v_1$ the car can safely travel on the road if $\mu = ~mu_1~$.
Find the maximum speed $v_2$ if the road is wet and slippery such that $\mu = ~mu_2~$.
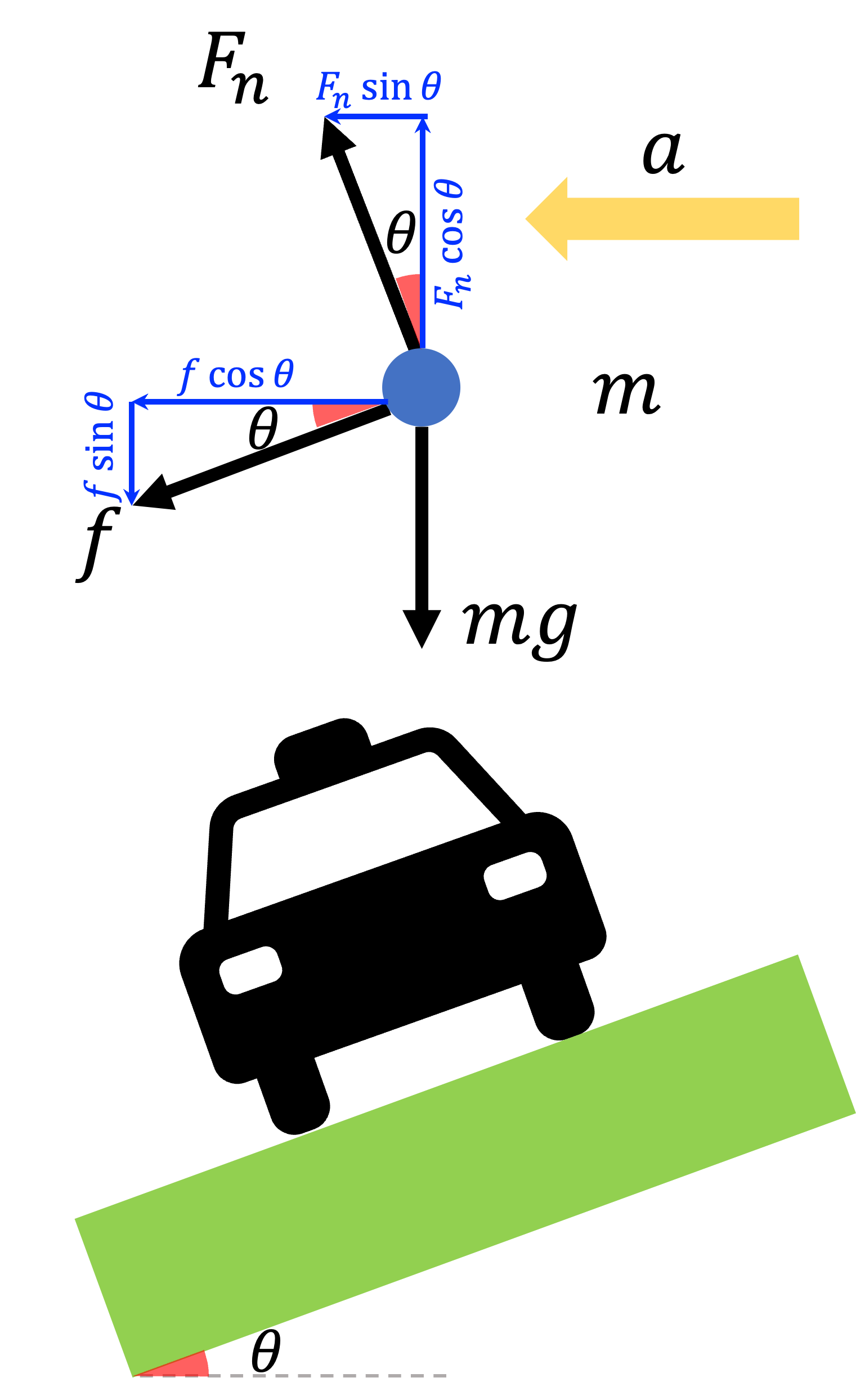
If the road is titled by an angle $\theta = ~theta~ ^\circ$:
Draw the force diagram. Indicate the direction of acceleration in the diagram. (No online submisson.)
We will warm up by considering the simple case when the road is frictionless, i.e. $f = 0$. Find the maximum speed $v_3$ in this case.
Going back to the case $f \neq 0$. Without putting in any numerical values, find $F_n$ and $f$ in terms of $m$, $\theta$, and $a$. (Symbolic manipulations, no online submission.)
Find the maximum speed $v_4$ the car can safely travel on the road if $\mu = ~mu_1~$.
Find the maximum speed $v_5$ if the road is wet and slippery such that $\mu = ~mu_2~$.
The vertical forces must cancel:
$$
\begin{eqnarray}
F_n &=& mg
\end{eqnarray}
$$
There is a horizontal acceleration due to the car turning as it follows the road. The force that produces the acceleration is friction:
$$
\begin{eqnarray}
m a_{cent} &=& f \leq \mu F_n \\
\Rightarrow m a_{cent} &\leq& \mu mg \\
\Rightarrow a_{cent} &\leq& \mu g \\
\Rightarrow \frac{v^2}{r} &\leq& \mu g \\
\Rightarrow v &\leq& \sqrt{\mu g r}
\end{eqnarray}
$$
On a slippery road, $\mu = ~mu_2~$:
$$
\begin{eqnarray}
v_2 &\leq& \sqrt{\mu_2 g r} \\
&=& \sqrt{(~mu_2~) (9.8 m/s^2) (~r~ m)} \\
&=& [[return sf_latex(v_2)]] m/s \\
&=& [[return sf_latex(v_2)]] m/s \times (\frac{1mph}{[[return sf_latex(factor_m_per_s_to_mph)]] m/s}) \\
&=& [[return sf_latex(v_2 / factor_m_per_s_to_mph)]] mph
\end{eqnarray}
$$
Tilted road
Force diagram on a tilted road.
$f = 0$
If there is no friction, canceling the vertical forces gives:
$$
\begin{eqnarray}
F_n \cos \theta &=& mg \\
\Rightarrow F_n &=& \frac{mg}{\cos \theta}
\end{eqnarray}
$$
The horizontal component of $F_n$ generates the centripetal acceleration:
$$
\begin{eqnarray}
F_n \sin \theta &=& m a_{cent} \\
\Rightarrow m a_{cent} &=& (\frac{mg}{\cos \theta}) \sin \theta \\
\Rightarrow a_{cent} &=& (\frac{\sin \theta}{\cos \theta}) g \\
\Rightarrow \frac{v^2}{r} &=& g \tan \theta \\
v_3 &=& \sqrt{g r \tan \theta} \\
&=& [[return sf_latex(v_3)]] m/s \\
&=& [[return sf_latex(v_3)]] m/s \times (\frac{1mph}{[[return sf_latex(factor_m_per_s_to_mph)]] m/s}) \\
&=& [[return sf_latex(v_3 / factor_m_per_s_to_mph)]] mph
\end{eqnarray}
$$
$f \neq 0$
$F_n$ and $f$
First ensure the vertical forces are canceled:
$$
\begin{eqnarray}
F_n \cos \theta &=& mg + f \sin \theta \\
\Rightarrow F_n &=& \frac{mg + f \sin \theta}{\cos \theta} \tag{1}
\end{eqnarray}
$$
The horizontal forces combined to generate the centripetal acceleration:
$$
\begin{eqnarray}
F_n \sin \theta + f \cos \theta &=& m a_{cent} \tag{2}
\end{eqnarray}
$$
Put (1) into (2):
$$
\begin{eqnarray}
(\frac{mg + f \sin \theta}{\cos \theta}) \sin \theta + f \cos \theta &=& m a_{cent} \\
\Rightarrow mg \sin \theta + f \sin^2 \theta + f \cos^2 \theta &=& m a_{cent} \cos \theta \\
\Rightarrow mg \sin \theta + f &=& m a_{cent} \cos \theta \\
\Rightarrow f &=& m a_{cent} \cos \theta - mg \sin \theta \tag{3}
\end{eqnarray}
$$
Put this back into (1):
$$
\begin{eqnarray}
F_n &=& \frac{mg + f \sin \theta}{\cos \theta} \\
&=& \frac{mg + (m a_{cent} \cos \theta - mg \sin \theta) \sin \theta}{\cos \theta} \\
&=& \frac{mg - mg \sin^2 \theta + m a_{cent} \cos \theta \sin \theta }{\cos \theta} \\
&=& \frac{mg (1 - \sin^2 \theta) + m a_{cent} \cos \theta \sin \theta }{\cos \theta} \\
&=& \frac{mg \cos^2 \theta + m a_{cent} \cos \theta \sin \theta }{\cos \theta} \\
&=& mg \cos \theta + m a_{cent} \sin \theta \tag{4}
\end{eqnarray}
$$
Maximum $v$
Combining (3) and (4):
$$
\begin{eqnarray}
f &\leq& \mu F_n \\
m a_{cent} \cos \theta - mg \sin \theta &\leq& \mu (mg \cos \theta + m a_{cent} \sin \theta) \\
\Rightarrow (\cos \theta - \mu \sin \theta) m a_{cent} &\leq& m g (\sin \theta + \mu \cos \theta) \\
\Rightarrow a_{cent} &\leq& \frac{\sin \theta + \mu \cos \theta}{\cos \theta - \mu \sin \theta} g \\
\Rightarrow \frac{v^2}{r} &\leq& (\frac{\sin \theta + \mu \cos \theta}{\cos \theta - \mu \sin \theta}) g \\
\Rightarrow v &\leq& \sqrt{(\frac{\sin \theta + \mu \cos \theta}{\cos \theta - \mu \sin \theta}) g r}
\end{eqnarray}
$$
Double check
You can double check the above answer by putting $f=0$:
$$
\begin{eqnarray}
v &\leq& \sqrt{(\frac{\sin \theta + 0}{\cos \theta - 0}) g r} \\
&=& \sqrt{g r \tan \theta}
\end{eqnarray}
$$
This is the same as the frictionless case before.
Exercise - Acceleration from the angle of a string
if (int_count_times_randomized == 0){
return 20;
} else {
return random_min_max_precision(5, 50, 0); //defined in setup_exercise_all.js
}
return (true);
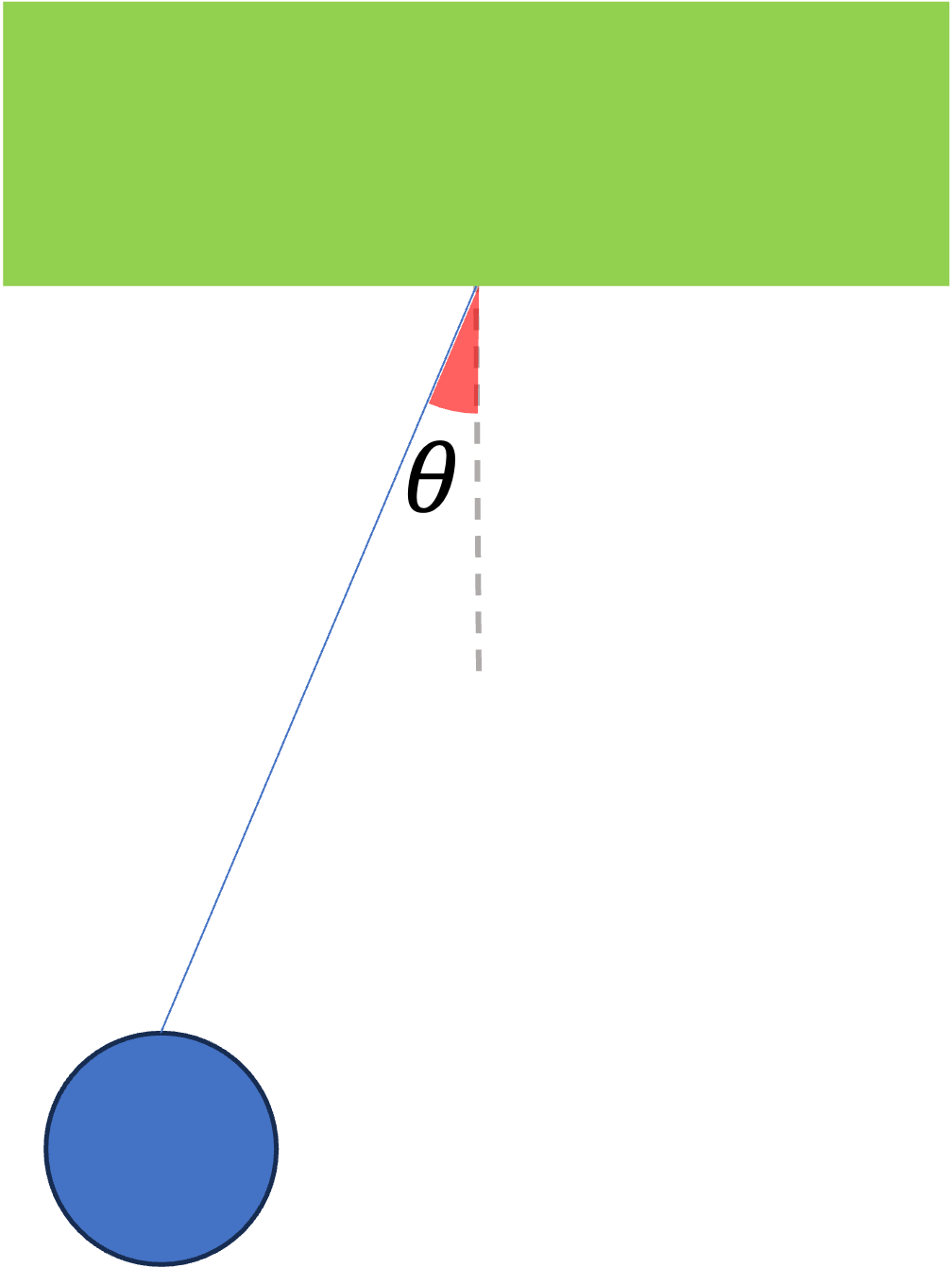
A ball hanging inside an accelerating car.
A ball is hung from the ceiling of a car that is changing its speed. It is observed that it makes an angle $\theta = ~theta~ ^\circ$ from the vertical as shown.
Draw the force diagram of the ball. Indicate in the diagram the direction of the acceleration. (No online submission.)
Determine the acceleration of the car.
a = 9.8 * Math.tan(~theta~ * Math.PI / 180);
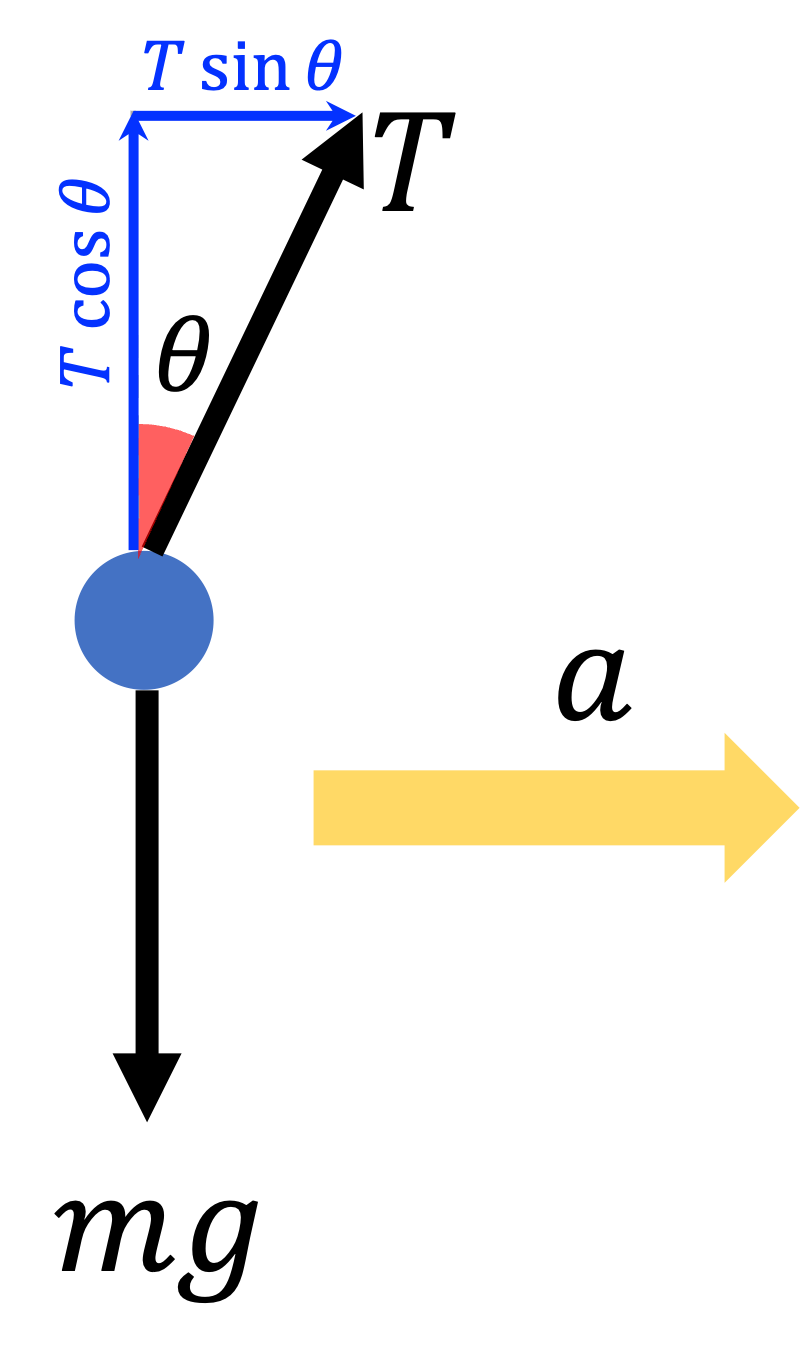
Hint: Decompose the forces into the horizontal and vertical components. The vertical forces cancel, while the horizontal force causes the acceleration.
Solution
Force diagram.
The vertical forces must cancel:
$$
\begin{eqnarray}
T \cos \theta &=& mg \\
\Rightarrow T &=& \frac{mg}{\cos \theta}
\end{eqnarray}
$$
The horizontal component of $T$ causes the acceleration of the ball:
$$
\begin{eqnarray}
T \sin \theta &=& m a \\
\Rightarrow a &=& \frac{T \sin \theta}{m} = \frac{(\frac{mg}{\cos \theta} ) \sin \theta}{m} \\
&=& g \tan \theta \\
&=& [[return sf_latex(a)]] m/s^2
\end{eqnarray}
$$
$a = $
return sf_math(a)
5%
$m/s^2$
force || centripetal || circular_motion || rotation
Exercise - A hanging ball undergoing circular motion
if (int_count_times_randomized == 0){
return 20;
} else {
return random_min_max_precision(5, 50, 0); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 1.5;
} else {
return random_min_max_precision(0.1, 2, 1); //defined in setup_exercise_all.js
}
return (true);
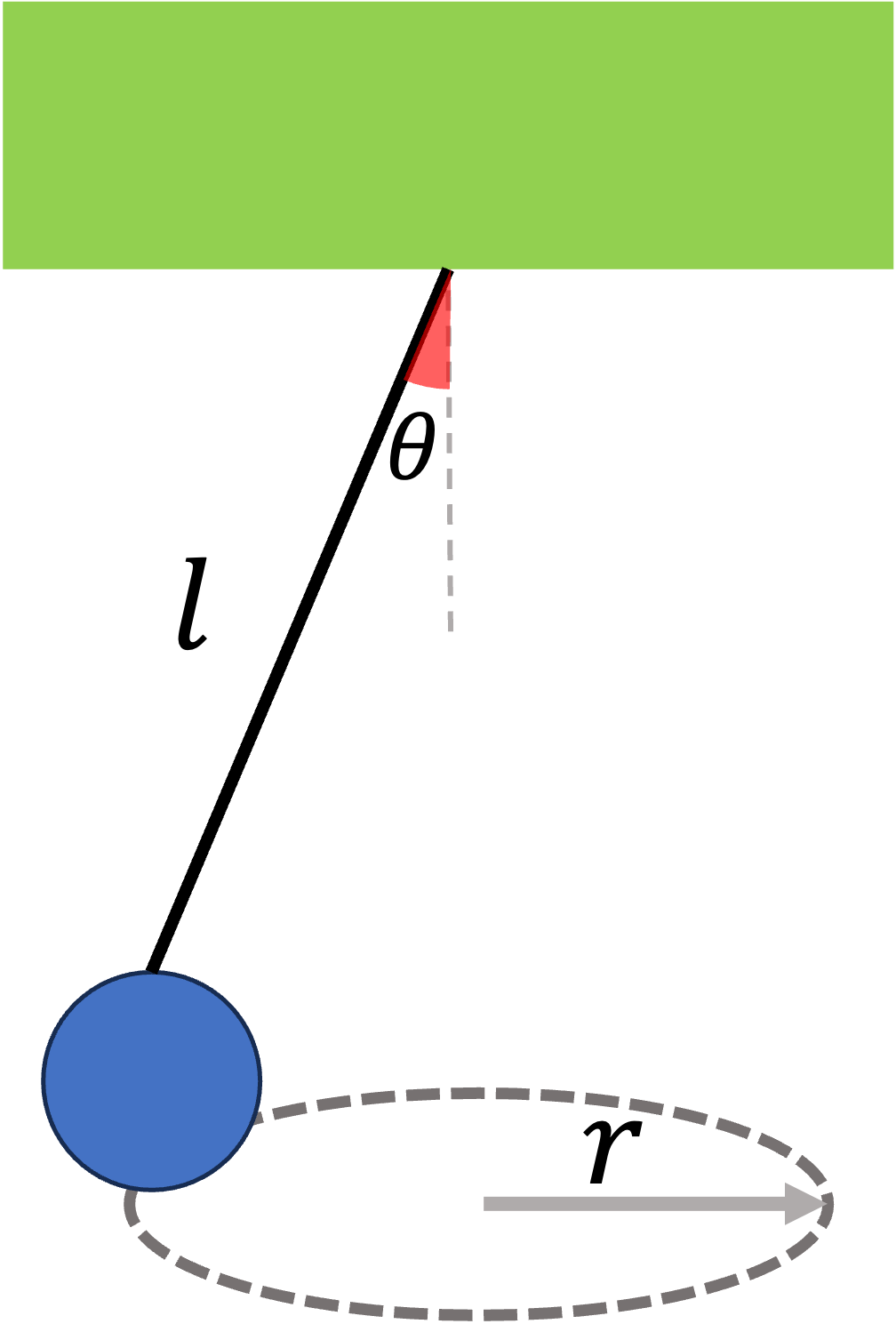
A ball moving in circle.
A ball hanging from the $~l~ m$-long string from the ceiling is moving in a circle as shown at constant tangential speed $v$. The angle the string makes with the vertical is $\theta = ~theta~ ^\circ$.
Draw the force diagram of the ball at the moment show in the figure. Indicate in the diagram the direction of the acceleration. (No online submission.)
Calculate $r$, the radius of the circular orbit.
Determine the centripetal acceleration of ball.
Calculate the speed of the ball.
theta_in_radian = ~theta~ * Math.PI / 180;
r = ~l~ * Math.sin(theta_in_radian);
a = 9.8 * Math.tan(theta_in_radian);
v = Math.sqrt(9.8 * r * Math.tan(theta_in_radian));
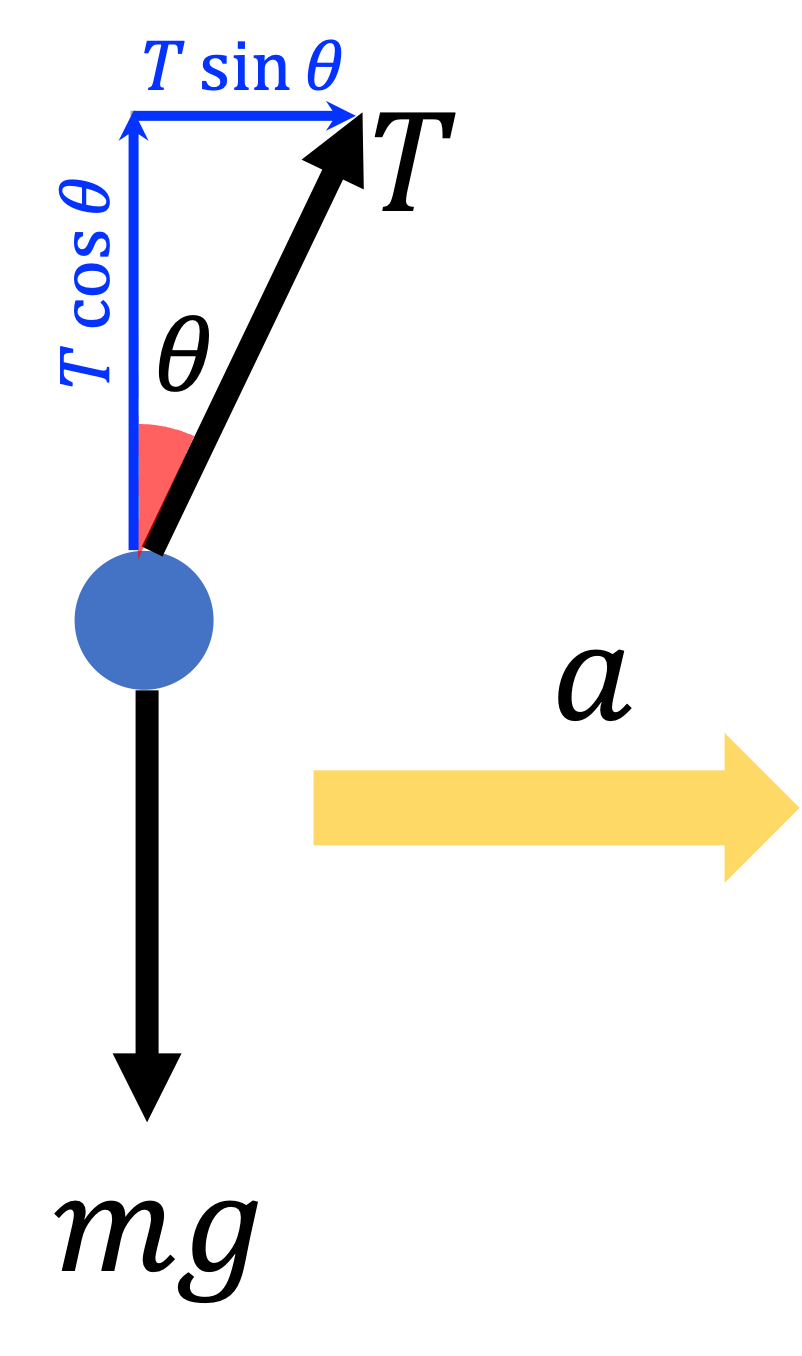
Hint: $a_{cent} = \frac{v^2}{r}$
Solution
Force diagram.
$r$
From the diagram of the ball:
$$
\begin{eqnarray}
r &=& l \sin \theta = (~l~ m) \sin ~theta~ ^\circ \\
&=& [[return sf_latex(r)]] m
\end{eqnarray}
$$
$a$
The vertical forces must cancel:
$$
\begin{eqnarray}
T \cos \theta &=& mg \\
\Rightarrow T &=& \frac{mg}{\cos \theta}
\end{eqnarray}
$$
The horizontal component of $T$ causes the acceleration of the ball:
$$
\begin{eqnarray}
T \sin \theta &=& m a \\
\Rightarrow a &=& \frac{T \sin \theta}{m} = \frac{(\frac{mg}{\cos \theta} ) \sin \theta}{m} \\
&=& g \tan \theta \\
&=& [[return sf_latex(a)]] m/s^2
\end{eqnarray}
$$
$v$
$$
\begin{eqnarray}
a &=& g \tan \theta \\
\Rightarrow \frac{v^2}{r} &=& g \tan \theta \\
\Rightarrow v &=& \sqrt{g r \tan \theta} \\
&=& \sqrt{g l \sin \theta \tan \theta} \\
&=& [[return sf_latex(v)]] m/s
\end{eqnarray}
$$
$r = $
return sf_math(r)
5%
$m$ $a = $
return sf_math(a)
5%
$m/s^2$ $v = $
return sf_math(v)
5%
$m/s$
force || incline
Exercise - Determining coefficient of static friction experimentally
if (int_count_times_randomized == 0){
return 10;
} else {
return random_min_max_precision(5, 20, 0); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 30;
} else {
return random_min_max_precision(5, 50, 0); //defined in setup_exercise_all.js
}
return (true);
A block resting on an incline.
A mass $m$ is resting on an incline. The angle of the incline is slowly increased until the mass begins sliding down when $\theta = ~theta~ ^\circ$.
Draw the force diagram when the mass is still at rest. Decompose the forces appropriately for this problem. (No online submission.)
Deduce the coefficient of static friction.
If $m = ~m~ kg$, calculate the normal force and the magnitude of friction.
theta_in_radian = ~theta~ * Math.PI / 180;
mu = Math.tan(theta_in_radian);
F_n = ~m~ * 9.8 * Math.cos(theta_in_radian);
f = mu * F_n;
Hint: Draw the force diagram and make sure the static friction is canceled out.
Solution
Force diagram.
$\mu$
To keep the notation simple, we will omit the subscript and write $\mu_s$ as $\mu$.
When the block starts moving, we know the static friction has reached its maximum value $f = \mu F_n$:
$$
\begin{eqnarray}
F_n &=& mg \cos \theta \\
\Rightarrow f &=& \mu F_n = \mu mg \cos \theta
\end{eqnarray}
$$
Since the object was still (barely) at rest, the forces along the parallel direction must cancel:
$$
\begin{eqnarray}
mg \sin \theta &=& f \\
\Rightarrow mg \sin \theta &=& \mu mg \cos \theta \\
\Rightarrow \mu &=& \frac{\sin \theta}{\cos \theta} = \tan \theta \\\\
&=& \tan ~theta~ ^\circ \\
&=& [[return sf_latex(mu)]]
\end{eqnarray}
$$
$F_n$
Given $m = ~m~ kg$, we can find the rest of the forces:
$$
\begin{eqnarray}
F_n &=& mg \cos \theta \\
&=& (~m~ kg) (9.8 m/s^2) \cos ~theta~ ^\circ \\
&=& [[return sf_latex(F_n)]] N
\end{eqnarray}
$$
$f$
$$
\begin{eqnarray}
f &=& \mu F_n = ([[return sf_latex(mu)]]) ([[return sf_latex(F_n)]] N) \\
&=& [[return sf_latex(f)]] N
\end{eqnarray}
$$
$\mu = $
return sf_math(mu)
5%
$F_n = $
return sf_math(F_n)
5%
$N$ $f = $
return sf_math(f)
5%
$N$
Select unit for $\mu$:
No unit
$N$
$N/m$
$J$
0
force || multi_body
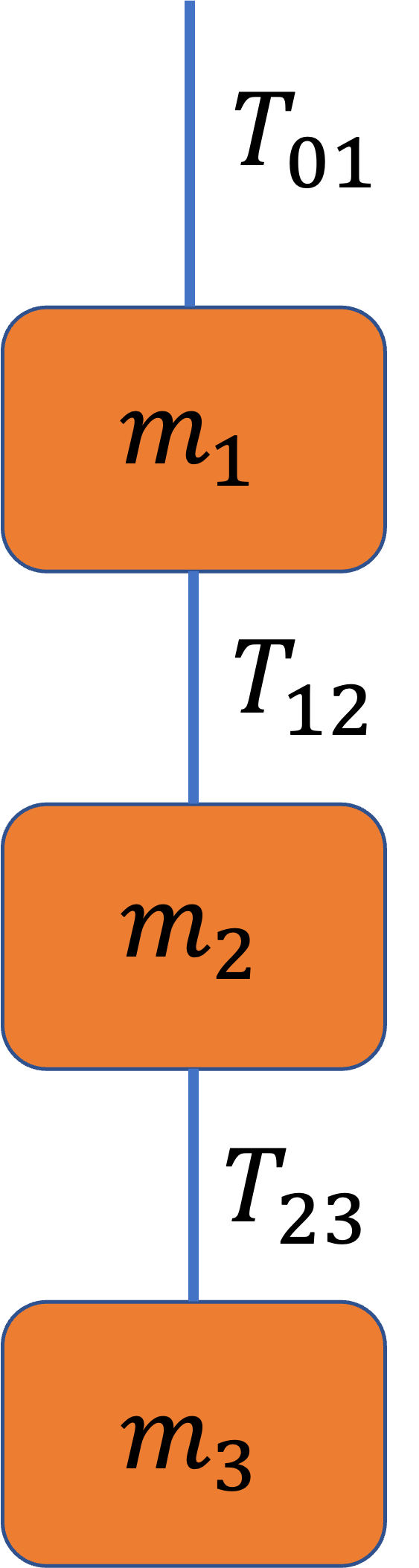
Exercise - Tension of three vertical blocks 1
if (int_count_times_randomized == 0){
return 1;
} else {
return random_min_max_precision(1, 10, 0); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 2;
} else {
return random_min_max_precision(1, 10, 0); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 3;
} else {
return random_min_max_precision(1, 10, 0); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 5;
} else {
return random_min_max_precision(0.5, 9, 1); //defined in setup_exercise_all.js
}
Hint: Draw the individual force diagrams and get three equations, from which solve for the three unknowns $T$.
Solution
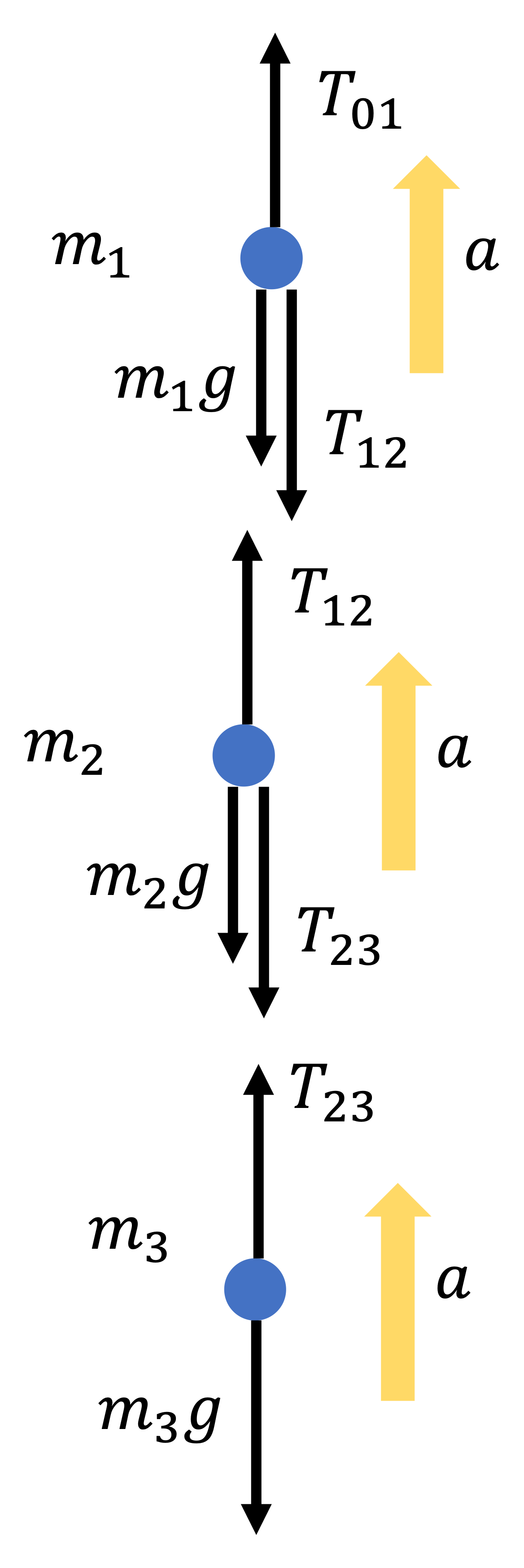
Force diagrams.
The equations
$$
\begin{eqnarray}
\left\{ % Comment a closing brace to remove the error warning. }
\begin{array}{rll} % Change to rl if text is no needed.
T_{01} - T_{12} - m_1 g &= m_1 a &\text{(1)}\\
T_{12} - T_{23} - m_2 g &= m_2 a &\text{(2)} \\
T_{23} - m_3 g &= m_3 a &\text{(3)}
\end{array} % If tag is used instead of text, then it will label the whole set.
\right.
\end{eqnarray}
$$
These equations can be simplified to isolate the tensions:
$$
\begin{eqnarray}
\left\{ % Comment a closing brace to remove the error warning. }
\begin{array}{rll} % Change to rl if text is no needed.
T_{01} - (m_1 + m_2 + m_3) g &= (m_1 + m_2 + m_3) a &\text{(1) + (2) + (3)} \\
T_{12} - (m_2 + m_3) g &= (m_2 + m_3) a &\text{(2) + (3)} \\
T_{23} - m_3 g &= m_3 a &\text{(3)}
\end{array} % If tag is used instead of text, then it will label the whole set.
\right.
\end{eqnarray}
$$
Rearranging one more time:
$$
\begin{eqnarray}
\left\{ % Comment a closing brace to remove the error warning. }
\begin{array}{rll} % Change to rl if text is no needed.
T_{01} &= (m_1 + m_2 + m_3) (g + a) &\text{(1) + (2) + (3)} \\
T_{12} &= (m_2 + m_3) (g + a) &\text{(2) + (3)} \\
T_{23} &= m_3 (g + a) &\text{(3)}
\end{array} % If tag is used instead of text, then it will label the whole set.
\right.
\end{eqnarray}
$$
These equations have simple physical interpretations. The equation for $T_{01}$ basically considers all three masses as a single object. The one for $T_{12}$ treats $m_2$ and $m_3$ as one object.
Tensions
Using (1) + (2) + (3):
$$
\begin{eqnarray}
T_{01} &=& (m_1 + m_2 + m_3) (g + a) \\
&=& (~m_1~ + ~m_2~ + ~m_3~) (9.8 + ~a~) \\
&=& [[return sf_latex(T_01)]] N
\end{eqnarray}
$$
Using (2) + (3):
$$
\begin{eqnarray}
T_{12} &=& (m_2 + m_3) (g + a) \\
&=& (~m_2~ + ~m_3~) (9.8 + ~a~) \\
&=& [[return sf_latex(T_12)]] N
\end{eqnarray}
$$
Using (3):
$$
\begin{eqnarray}
T_{23} &=& m_3 (g + a) \\
&=& (~m_3~) (9.8 + ~a~) \\
&=& [[return sf_latex(T_23)]] N
\end{eqnarray}
$$
Downward acceleration
In our previous calculations, we defined up to be the positive direction so that $a = ~a~ m/s^2$. If $a$ points down, you can simply set $a = -~a~ m/s^2$ (because $a$ is now pointing in the negative direction based on the direction set up for the equations).
Using (1) + (2) + (3):
$$
\begin{eqnarray}
T_{01} &=& (m_1 + m_2 + m_3) (g + a) \\
&=& (~m_1~ + ~m_2~ + ~m_3~) (9.8 - ~a~) \\
&=& [[return sf_latex(T_01_down)]] N
\end{eqnarray}
$$
Alternative approach
Force diagrams.
You could also redo all the equation if you now set the down direction to be positive so that $a = +~a~ m/s^2$ (instead of $a = -~a~ m/s^2$). In this convention, you will get:
$$
\begin{eqnarray}
\left\{ % Comment a closing brace to remove the error warning. }
\begin{array}{rll} % Change to rl if text is no needed.
m_1 g + T_{12} - T_{01} &= m_1 a &\text{(1)}\\
m_2 g + T_{23} - T_{12} &= m_2 a &\text{(2)} \\
m_3 g - T_{23} &= m_3 a &\text{(3)}
\end{array} % If tag is used instead of text, then it will label the whole set.
\right.
\end{eqnarray}
$$
$$
\begin{eqnarray}
\left\{ % Comment a closing brace to remove the error warning. }
\begin{array}{rll} % Change to rl if text is no needed.
(m_1 + m_2 + m_3) g - T_{01} &= (m_1 + m_2 + m_3) a &\text{(1) + (2) + (3)} \\
(m_2 + m_3) g - T_{12} &= (m_2 + m_3) a &\text{(2) + (3)} \\
m_3 g - T_{23} &= m_3 a &\text{(3)}
\end{array} % If tag is used instead of text, then it will label the whole set.
\right.
\end{eqnarray}
$$
Rearranging one more time:
$$
\begin{eqnarray}
\left\{ % Comment a closing brace to remove the error warning. }
\begin{array}{rll} % Change to rl if text is no needed.
T_{01} &= (m_1 + m_2 + m_3) (g - a) &\text{(1) + (2) + (3)} \\
T_{12} &= (m_2 + m_3) (g - a) &\text{(2) + (3)} \\
T_{23} &= m_3 (g - a) &\text{(3)}
\end{array} % If tag is used instead of text, then it will label the whole set.
\right.
\end{eqnarray}
$$
This will give you the same answer.
$T_{01} = $
return sf_math(T_01)
5%
$T_{12} = $
return sf_math(T_12)
5%
$T_{23} = $
return sf_math(T_23)
5%
If $a$ points downward: $T_{01} = $
return sf_math(T_01_down)
5%
Select unit for tension:
$kg$
$T$
$N$
$J$
2
force || incline
Exercise - Frictionless incline with additional force 1
if (int_count_times_randomized == 0){
return 10;
} else {
return random_min_max_precision(3, 20, 0); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 30;
} else {
return random_min_max_precision(20, 80, 0); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 40;
} else {
return random_min_max_precision(10, 50, 0); //defined in setup_exercise_all.js
}
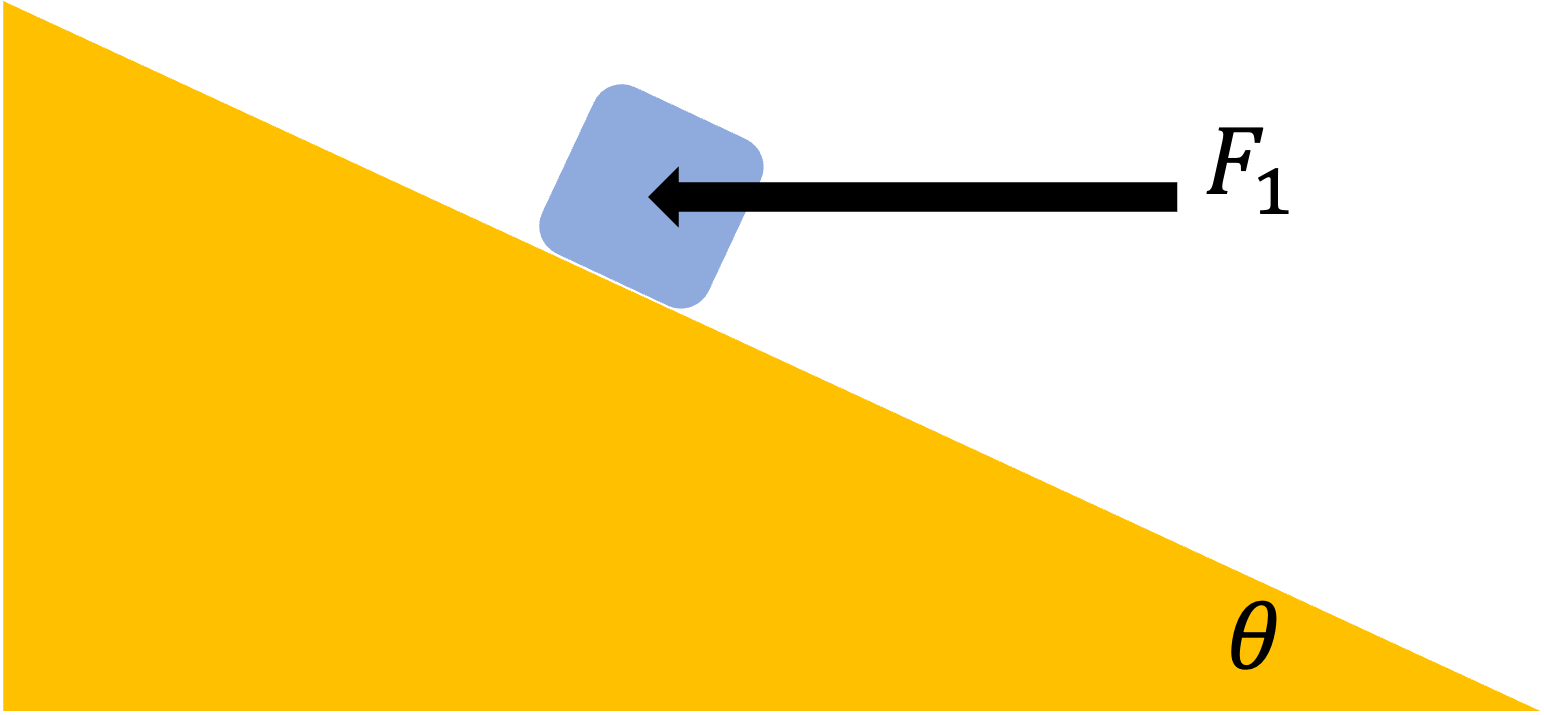
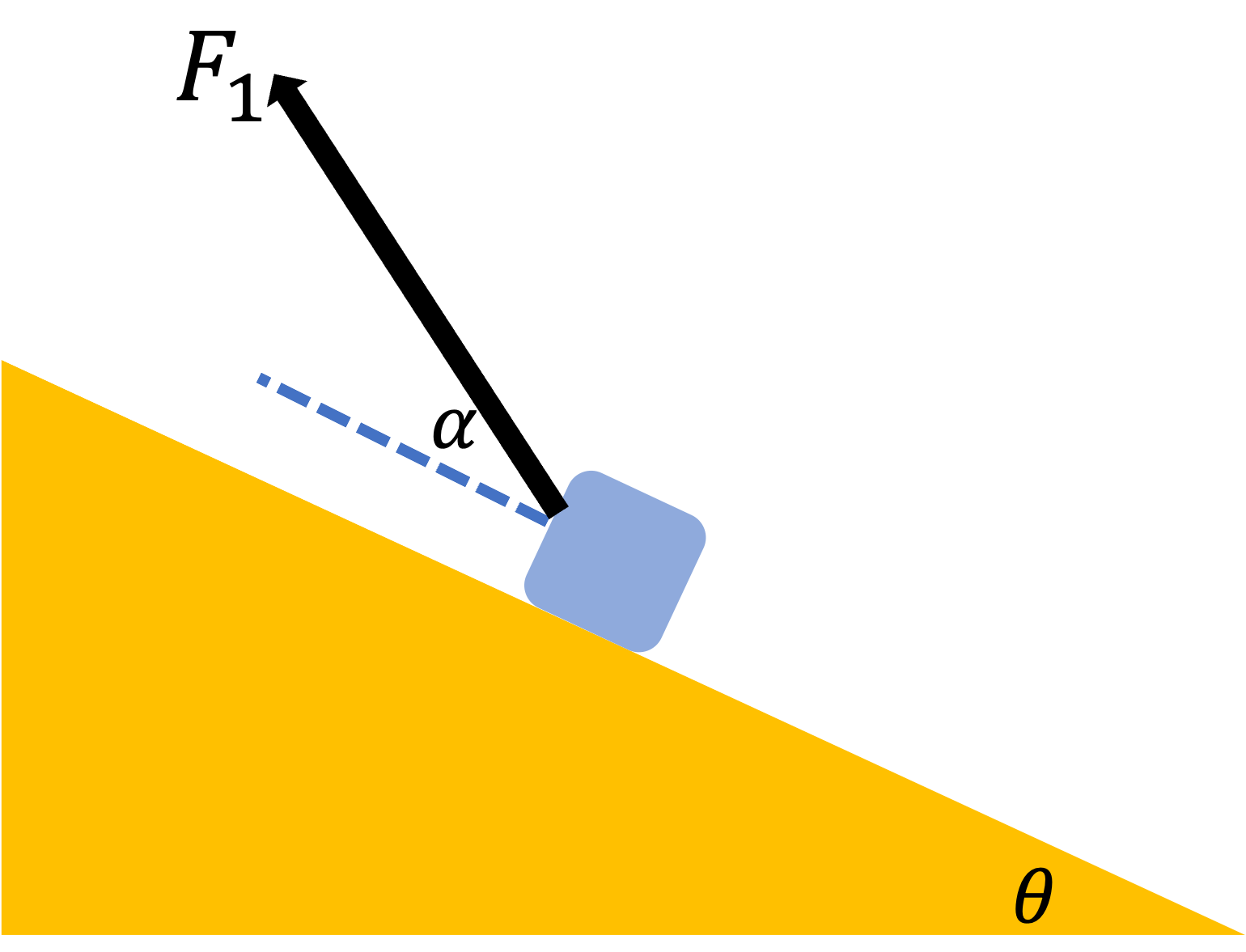
A block $m = ~m~ kg$ is sliding on a frictionless incline $\theta = ~theta~ ^\circ$ to the horizontal. A force $F_1 = ~F_1~ N$ is applied at angle $\alpha = ~alpha~ ^\circ$ to the incline as shown.
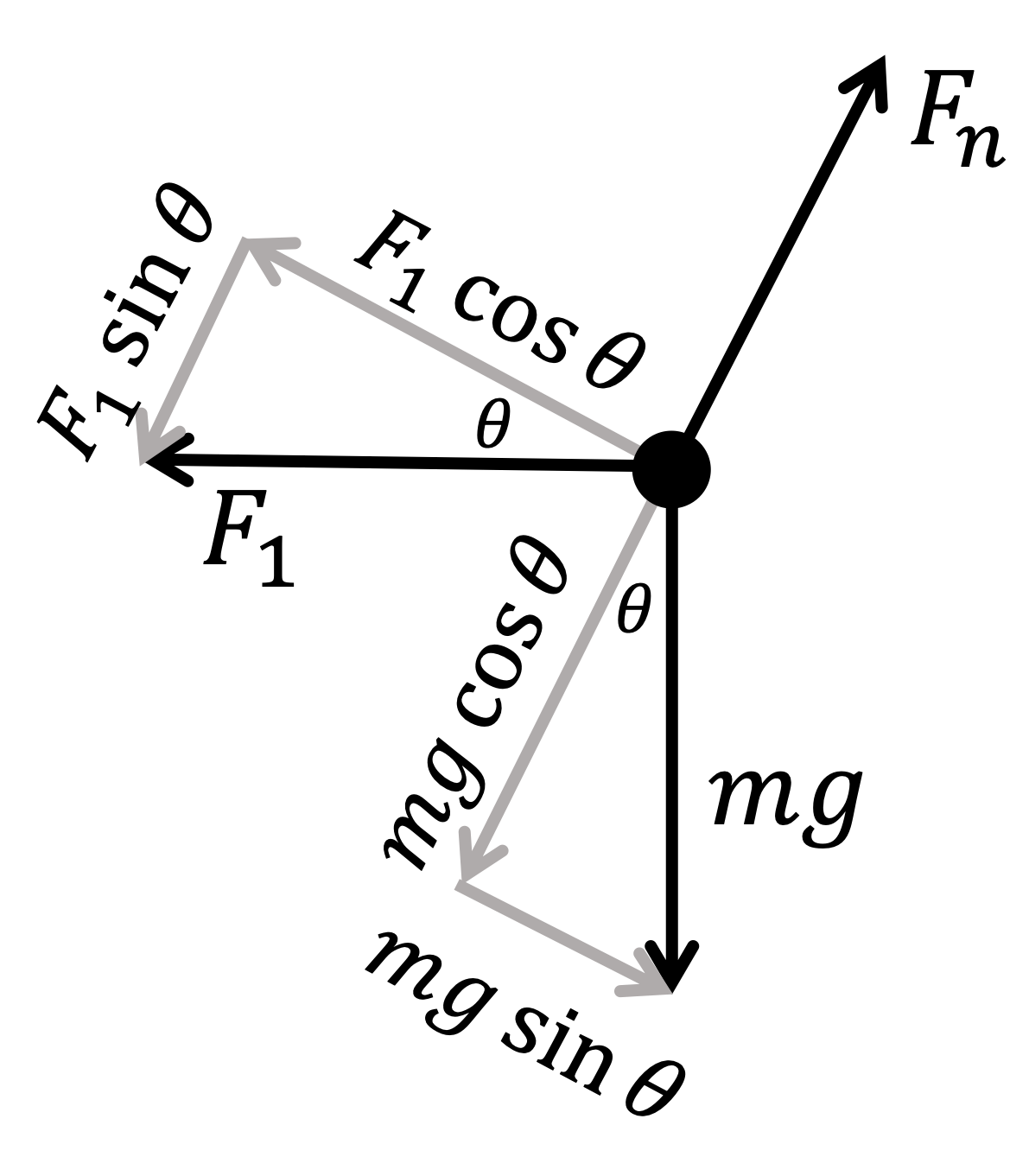
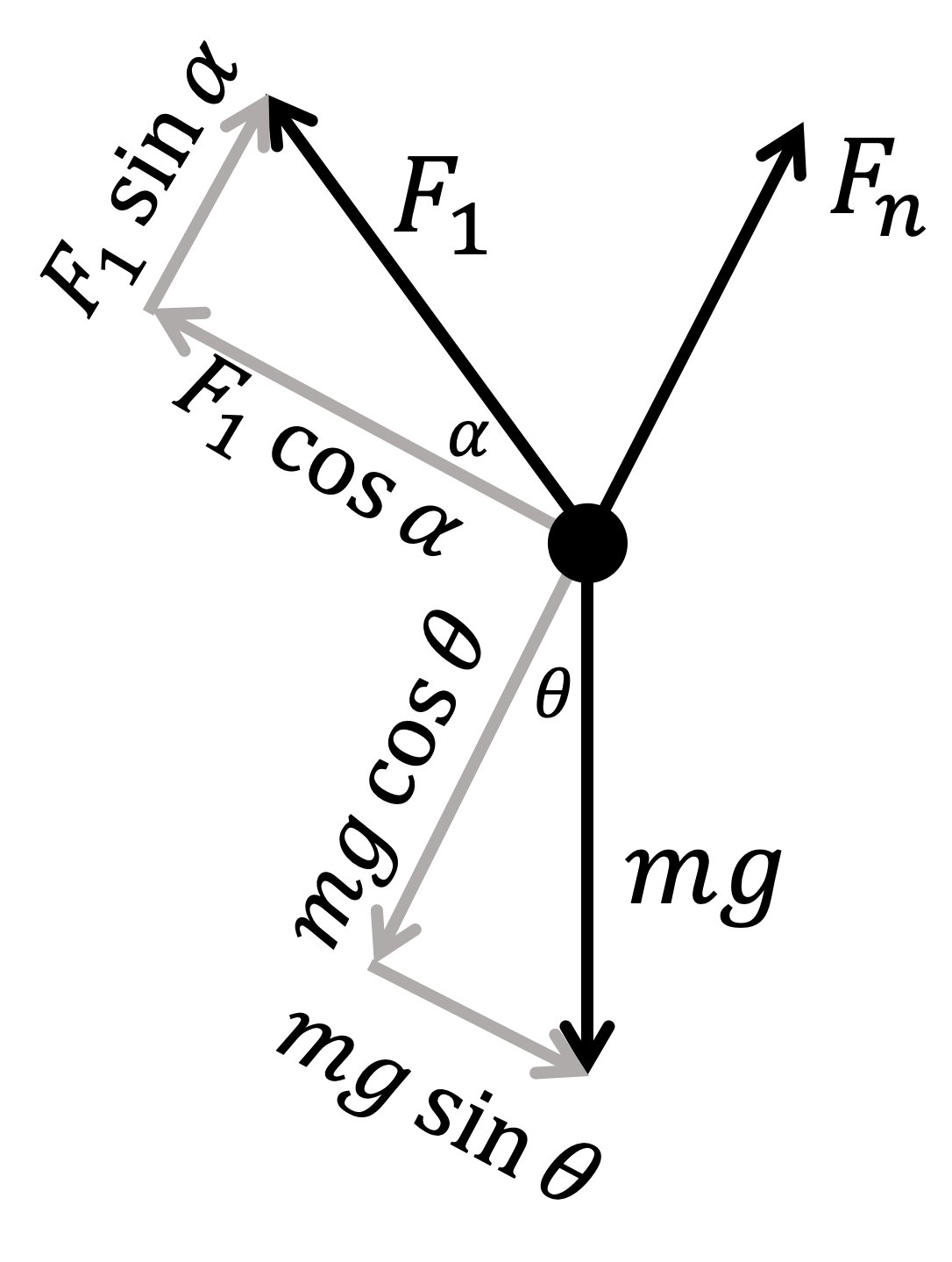
Draw the force diagram and show how you decompose the forces. (No online submission.)
Calculate the normal force.
Calculate the magnitude of the acceleration.
Hint: Decompose all forces along the parallel and perpendicular directions.