if (int_count_times_randomized == 0){
return 60;
} else {
return random_min_max_precision(30, 350, -1); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 5;
} else {
return random_min_max_precision(2, 20, 0); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 6;
} else {
return random_min_max_precision(2, 10, 0); //defined in setup_exercise_all.js
}
return (true);
A object in uniform circular motion.
[[
namespace_circular_motion.theta = ~theta~ * Math.PI/180;
namespace_circular_motion.omega = namespace_circular_motion.theta / ~t~;
namespace_circular_motion.v = namespace_circular_motion.omega * ~r~;
return "";
]]
An object travels around a circle of radius $~r~ m$. Its angle measured at the center increases by $~theta~^\circ$ in $~t~ s$. Find the angular velocity $\omega$.
First we convert the angle to radians:
$$
\begin{eqnarray}
\theta &=& ~theta~^\circ \times \frac{\pi \ rad}{180^\circ} \\
&=& [[return sf_latex(namespace_circular_motion.theta)]] rad
\end{eqnarray}
$$
Angular velocity
$$
\begin{eqnarray}
\omega &=& \frac{\Delta \theta}{\Delta t} \\
&=& \frac{[[return sf_latex(namespace_circular_motion.theta)]] rad}{~t~ s} \\
&=& [[return sf_latex(namespace_circular_motion.omega)]] rad/s
\end{eqnarray}
$$
It means that every second the angle increases by $[[return sf_latex(namespace_circular_motion.omega)]] rad$.
$\omega = $
return sf_math(namespace_circular_motion.omega)
5%
Select unit for $\omega$:
$m/s$
$Hz$
$rad$
$rad/s$
3
circular_motion || rotation
Exercise - Angular velocity and tangential speed
if (int_count_times_randomized == 0){
return 60;
} else {
return random_min_max_precision(30, 350, -1); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 5;
} else {
return random_min_max_precision(2, 20, 0); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 6;
} else {
return random_min_max_precision(2, 10, 0); //defined in setup_exercise_all.js
}
return (true);
A object in uniform circular motion.
[[
namespace_circular_motion.theta = ~theta~ * Math.PI/180;
namespace_circular_motion.omega = namespace_circular_motion.theta / ~t~;
namespace_circular_motion.v = namespace_circular_motion.omega * ~r~;
return "";
]]
An object travels around a circle of radius $~r~ m$. Its angle measured at the center increases by $~theta~^\circ$ in $~t~ s$.
Find:
First we convert the angle to radians:
$$
\begin{eqnarray}
\theta &=& ~theta~^\circ \times \frac{\pi \ rad}{180^\circ} \\
&=& [[return sf_latex(namespace_circular_motion.theta)]] rad
\end{eqnarray}
$$
Angular velocity
$$
\begin{eqnarray}
\omega &=& \frac{\Delta \theta}{\Delta t} \\
&=& \frac{[[return sf_latex(namespace_circular_motion.theta)]] rad}{~t~ s} \\
&=& [[return sf_latex(namespace_circular_motion.omega)]] rad/s
\end{eqnarray}
$$
It means that every second the angle increases by $[[return sf_latex(namespace_circular_motion.omega)]] rad$.
Tangential speed
$$
\begin{eqnarray}
v &=& r \omega \\
&=& (~r~ m)([[return sf_latex(namespace_circular_motion.omega)]] rad/s) \\
&=& [[return sf_latex(namespace_circular_motion.v)]] m/s
\end{eqnarray}
$$
$\omega = $
return sf_math(namespace_circular_motion.omega)
5%
$v = $
return sf_math(namespace_circular_motion.v)
5%
Select unit for $\omega$:
$m/s$
$Hz$
$rad$
$rad/s$
3
Select unit for $v$:
$m/s$
$Hz$
$rad$
$rad/s$
0
circular_motion || rotation
Exercise - Angular acceleration basic
if (int_count_times_randomized == 0){
return 5;
} else {
return random_min_max_precision(-10, 10, -1); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 8;
} else {
return random_min_max_precision(-10, 10, 0, false, -0.5, 0.5); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 5;
} else {
return random_min_max_precision(2, 20, 0); //defined in setup_exercise_all.js
}
return (true);
[[
namespace_circular_motion.omega_f = ~omega_i~ + ~delta_omega~;
namespace_circular_motion.alpha = ~delta_omega~ / ~t~;
return "";
]]
An object travels around a circle with an initial angular velocity of $~omega_i~ rad/s$. After $~t~ s$ its angular velocity becomes $[[return namespace_circular_motion.omega_f]] rad/s$.
Find the angular acceleration $\alpha$.
Exercise - Angular velocity, frequency, and period ($\omega$, $f$ and $T$)
if (int_count_times_randomized == 0){
return 3;
} else {
return random_min_max_precision(1, 10, 0); //defined in setup_exercise_all.js.
}
if (int_count_times_randomized == 0){
return 0;
} else {
return random_min_max_precision(0, 2, 0); //defined in setup_exercise_all.js.
}
return (true);
[[
namespace_circular_motion.f = ~omega~/(2*Math.PI);
namespace_circular_motion.period = 2*Math.PI/~omega~;
return "";
]]
The value of one of the variables (angular velocity $\omega$, frequency $f$, and period $T$) below has been given to you. Use that information to calculate the others.
Hint: Use $\omega = \frac{2\pi}{T} = 2\pi f$.
Solution
Rearrange $\omega = \frac{2\pi}{T} = 2\pi f$ to solve for what you need.
When $\omega$ is given, we have:
$$
\begin{eqnarray}
T &=& \frac{2\pi}{\omega} \\
&=& \frac{2\pi}{~omega~ rad/s} \\
&=& [[return sf_latex(namespace_circular_motion.period)]] s
\end{eqnarray}
$$
$$
\begin{eqnarray}
f &=& \frac{\omega}{2\pi} \\
&=& \frac{~omega~ rad/s}{2\pi} \\
&=& [[return sf_latex(namespace_circular_motion.f)]] Hz
\end{eqnarray}
$$
When $f$ is given, we have:
$$
\begin{eqnarray}
\omega &=& 2\pi f \\
&=& 2\pi ([[return sf_latex(namespace_circular_motion.f)]] Hz) \\
&=& ~omega~ rad/s
\end{eqnarray}
$$
$$
\begin{eqnarray}
T &=& \frac{1}{f} \\
&=& \frac{1}{[[return sf_latex(namespace_circular_motion.f)]] Hz} \\
&=& [[return sf_latex(namespace_circular_motion.period)]] s
\end{eqnarray}
$$
if (int_count_times_randomized == 0){
return 10;
} else {
return random_min_max_precision(5, 100, 0); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 2;
} else {
return random_min_max_precision(2, 10, 0); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 5;
} else {
return random_min_max_precision(2, 8, 0); //defined in setup_exercise_all.js
}
return (true);
A object moves around a circle of radius $r = ~r~ m$ a total of $~count_revolution~$ time[[return (~count_revolution~>1)? "s":""]] every $~t_total~ s$.
Find:
The time it takes for the object to go around 1 circle is the period $T$.
$\omega = \frac{2\pi}{T} = 2\pi f$.
$v = \omega r$.
Solution
Period
The period is the time it takes to go around the circle once:
$$
\begin{eqnarray}
T &=& \frac{~t_total~ s}{~count_revolution~} \\
&=& [[return sf_latex(namespace_circular_motion.period)]] s
\end{eqnarray}
$$
Once we have $T = [[return sf_latex(namespace_circular_motion.period)]] s$, we can find everything else using $\omega = \frac{2\pi}{T} = 2\pi f$ and $v = \omega r$.
$$
\begin{eqnarray}
v &=& \omega r \\
&=& ([[return sf_latex(namespace_circular_motion.omega)]] rad/s) (~r~ m) \\
&=& [[return sf_latex(namespace_circular_motion.v)]] m/s
\end{eqnarray}
$$
The number of revolutions per second is the frequency $f$.
$\omega = \frac{2\pi}{T} = 2\pi f$.
$v = \omega r$.
Solution
Frequency $f$
By definition, the number of revolutions per second is the frequency $f$, so we have $f = [[return namespace_circular_motion.f]] Hz$ (or $rps$).
Once we have $f$, we can find everything else using $\omega = \frac{2\pi}{T} = 2\pi f$ and $v = \omega r$.
Period
The period is the time it takes to go around the circle once:
$$
\begin{eqnarray}
T &=& \frac{1}{f} \\
&=& \frac{1}{~count_revolution~ Hz} \\
&=& [[return sf_latex(namespace_circular_motion.period)]] s
\end{eqnarray}
$$
$$
\begin{eqnarray}
v &=& \omega r \\
&=& ([[return sf_latex(namespace_circular_motion.omega)]] rad/s) (~r~ m) \\
&=& [[return sf_latex(namespace_circular_motion.v)]] m/s
\end{eqnarray}
$$
if (int_count_times_randomized == 0){
return 3;
} else {
return random_min_max_precision(1, 10, 0); //defined in setup_exercise_all.js.
}
if (int_count_times_randomized == 0){
return 0;
} else {
return random_min_max_precision(0, 2, 0); //defined in setup_exercise_all.js.
}
if (int_count_times_randomized == 0){
return 4;
} else {
return random_min_max_precision(2, 10, 0); //defined in setup_exercise_all.js.
}
if (int_count_times_randomized == 0){
return 6;
} else {
return random_min_max_precision(2, 10, 0); //defined in setup_exercise_all.js.
}
return (true);
An object of mass $~m~ kg$ moves around a circle of radius $~r~ m$ with
[[
namespace_circular_motion.omega = ~omega~;
namespace_circular_motion.f = ~omega~/(2*Math.PI);
namespace_circular_motion.period = 2*Math.PI/~omega~;
namespace_circular_motion.a_cent = ~r~ * ~omega~*~omega~;
namespace_circular_motion.f_cent = ~m~ * namespace_circular_motion.a_cent;
namespace_circular_motion.v = ~r~ * ~omega~;
if (~int_variable_choice~ == 0){
return `angular velocity $~omega~ rad/s$.`;
} else if (~int_variable_choice~ == 1){
return `frequency $${sf_latex(namespace_circular_motion.f)} Hz$.`;
} else if (~int_variable_choice~ == 2){
return `period $${sf_latex(namespace_circular_motion.period)} s$.`;
} else {
return "";
}
]]
Find:
The centripetal acceleration $a_{cent}$.
The tangential speed $v$.
Hint:
Use $\omega = \frac{2\pi}{T} = 2\pi f$ to find $\omega$ first.
$a_{cent} = r \omega^2$.
$v = r \omega$.
Solution
Find $\omega$
When $f$ is given, we can first find $\omega$:
$$
\begin{eqnarray}
\omega &=& 2\pi f \\
&=& 2\pi ([[return sf_latex(namespace_circular_motion.f)]] Hz) \\
&=& ~omega~ rad/s
\end{eqnarray}
$$
Find $\omega$
When $T$ is given, we can first find $\omega$:
$$
\begin{eqnarray}
\omega &=& \frac{2\pi}{T} \\
&=& \frac{2\pi}{[[return sf_latex(namespace_circular_motion.period)]] s} \\
&=& ~omega~ rad/s
\end{eqnarray}
$$
$$
\begin{eqnarray}
v &=& r \omega \\
&=& (~r~ m)(~omega~ rad/s) \\
&=& [[return sf_latex(namespace_circular_motion.v)]] m/s
\end{eqnarray}
$$
$a_{cent} = $
return sf_math(namespace_circular_motion.a_cent);
5%
Unit:
return "m/s^2";
not_number
$v=$
return sf_math(namespace_circular_motion.v);
5%
Unit:
return "m/s";
not_number
circular_motion || rotation
Exercise - Centripetal force basic
if (int_count_times_randomized == 0){
return 3;
} else {
return random_min_max_precision(1, 10, 0); //defined in setup_exercise_all.js.
}
if (int_count_times_randomized == 0){
return 0;
} else {
return random_min_max_precision(0, 2, 0); //defined in setup_exercise_all.js.
}
if (int_count_times_randomized == 0){
return 4;
} else {
return random_min_max_precision(2, 10, 0); //defined in setup_exercise_all.js.
}
if (int_count_times_randomized == 0){
return 6;
} else {
return random_min_max_precision(2, 10, 0); //defined in setup_exercise_all.js.
}
return (true);
An object of mass $~m~ kg$ moves around a circle of radius $~r~ m$ with
[[
namespace_circular_motion.omega = ~omega~;
namespace_circular_motion.f = ~omega~/(2*Math.PI);
namespace_circular_motion.period = 2*Math.PI/~omega~;
namespace_circular_motion.a_cent = ~r~ * ~omega~*~omega~;
namespace_circular_motion.f_cent = ~m~ * namespace_circular_motion.a_cent;
namespace_circular_motion.v = ~r~ * ~omega~;
if (~int_variable_choice~ == 0){
return `angular velocity $~omega~ rad/s$.`;
} else if (~int_variable_choice~ == 1){
return `frequency $${sf_latex(namespace_circular_motion.f)} Hz$.`;
} else if (~int_variable_choice~ == 2){
return `period $${sf_latex(namespace_circular_motion.period)} s$.`;
} else {
return "";
}
]]
Find:
The centripetal acceleration $a_{cent}$.
The centripetal force $F_{cent}$.
The tangential speed $v$.
Hint:
Use $\omega = \frac{2\pi}{T} = 2\pi f$ to find $\omega$ first.
$a_{cent} = r \omega^2$.
$F_{cent} = m a_{cent} = m r \omega^2$.
$v = r \omega$.
Solution
Find $\omega$
When $f$ is given, we can first find $\omega$:
$$
\begin{eqnarray}
\omega &=& 2\pi f \\
&=& 2\pi ([[return sf_latex(namespace_circular_motion.f)]] Hz) \\
&=& ~omega~ rad/s
\end{eqnarray}
$$
Find $\omega$
When $T$ is given, we can first find $\omega$:
$$
\begin{eqnarray}
\omega &=& \frac{2\pi}{T} \\
&=& \frac{2\pi}{[[return sf_latex(namespace_circular_motion.period)]] s} \\
&=& ~omega~ rad/s
\end{eqnarray}
$$
if (int_count_times_randomized == 0){
return 2;
} else {
return random_min_max_precision(1, 7, 0); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 12;
} else {
return random_min_max_precision(10, 30, 0); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 50;
} else {
return random_min_max_precision(30, 100, 0); //defined in setup_exercise_all.js
}
return (true);
[[
namespace_circular_motion.v = Math.sqrt(~r~ * 0.01 * ~tension~ / ~m~);
return "";
]]
A ball of mass $~m~ kg$ is tied to a string $~r~ cm$ (not in meters!) long and swung around in circles. The string can withstand a maximum tension of $~tension~N$.
How fast (in terms of the tangential speed $v$) do you have to spin the object in order to break the string?
Hint:
$F_{cent} = \frac{m v^2}{r}$.
Solution
The centripetal force on the ball is provided by the tension $Tension$, so we can identify $F_{cent}=Tension$ (I don't want to use $T$ for tension here because $T$ is also the notation for period):
$$
\begin{eqnarray}
Tension &=& F_{cent} = \frac{mv^2}{r} \\
v &=& \sqrt{\frac{r (Tension)}{m}} \\
&=& \sqrt{\frac{(~r~ \times 0.01 m) (~tension~ N)}{~m~ kg}} \\
&=& [[return sf_latex(namespace_circular_motion.v)]] m/s
\end{eqnarray}
$$
$v= $
return sf_math(namespace_circular_motion.v)
5%
$m/s$
rotation
Exercise - An accelerating wheel 1
if (int_count_times_randomized == 0){
return 10;
} else {
return random_min_max_precision(5, 10, 0); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 4;
} else {
return random_min_max_precision(1, 7, 0); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 5;
} else {
return random_min_max_precision(2, 10, 0); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 0.2;
} else {
return random_min_max_precision(0.1, 0.5, 1); //defined in setup_exercise_all.js
}
return (true);
[[
namespace_circular_motion.theta = ~omega_0~ * ~t~ + 0.5 * ~alpha~ * ~t~*~t~;
namespace_circular_motion.s = namespace_circular_motion.theta * ~r~;
return "";
]]
A wheel of radius $~r~m$ was originally rolling on the ground at $~omega_0~ rad/s$. It then accelerated at $~alpha~ rad/s^2$ for $~t~ s$.
Find for this time period:
The angle of rotation (i.e. the angular displacement) $\theta$.
The distance $s$ it traveled on the ground.
Hint: Use the angular version of the equations of motion.
Solution
The angle
The information given:
$\theta_0=0 rad$
$\omega_0=~omega_0~ rad/s$
$\theta=?$
$\omega=$ missing
$\alpha= ~alpha~ rad/s^2$
$t=~t~ s$
Note that "$\theta=?$" above means we are looking for $\theta$. Out of the final variables $\theta, \omega, \alpha, t$, only $\omega$
does not appear in the list above. This means we should use the $\omega$-equation:
$$
\begin{eqnarray}
\theta-\theta_0 &=& \omega_0 t + \frac{1}{2} \alpha t^2 \\
\Rightarrow \theta &=& (~omega_0~ rad/s) (~t~ s) + \frac{1}{2} (~alpha~ rad/s^2) (~t~ s)^2 \\
&=& [[return sf_latex(namespace_circular_motion.theta)]] rad
\end{eqnarray}
$$
Distance traveled
$$
\begin{eqnarray}
s &=& r \theta \\
&=& (~r~ m)([[return sf_latex(namespace_circular_motion.theta)]] rad) \\
&=& [[return sf_latex(namespace_circular_motion.s)]]m
\end{eqnarray}
$$
$\theta= $
return sf_math(namespace_circular_motion.theta)
5%
$rad$ $s= $
return sf_math(namespace_circular_motion.s)
5%
$m$
rotation
Exercise - An accelerating wheel 2
if (int_count_times_randomized == 0){
return 10;
} else {
return random_min_max_precision(2, 20, 0); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 4;
} else {
return random_min_max_precision(2, 20, 0); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 80;
} else {
return random_min_max_precision(10, 100, -1); //defined in setup_exercise_all.js
}
return (true);
[[
namespace_circular_motion.alpha = (~omega_f~*~omega_f~ - ~omega_0~*~omega_0~) / (2 * ~theta~);
return "";
]]
A wheel was originally rolling on the ground at $~omega_0~ rad/s$. Its final angular velocity became $~omega_f~ rad/s$ after it rotated $~theta~ rad$.
Find the angular acceleration of the wheel.
Hint: Use the angular version of the equations of motion.
Solution
The information given:
$\theta_0=0 rad$
$\omega_0=~omega_0~ rad/s$
$\theta= ~theta~ rad$
$\omega= ~omega_f~ rad/s$
$\alpha=$ ?
$t=$ missing
Note that "$\alpha=?$" above means we are looking for $\alpha$. Out of the final variables $\theta, \omega, \alpha, t$, only $t$
does not appear in the list above. This means we should use the $t$-equation:
$$
\begin{eqnarray}
\omega^2 &=& \omega_0^2 +2 \alpha \theta \\
\Rightarrow \alpha &=& \frac{\omega^2 - \omega_0^2}{2 \theta} \\
&=& \frac{(~omega_f~ rad/s)^2 - (~omega_0~ rad/s)^2}{2 (~theta~ rad) } \\
&=& [[return sf_latex(namespace_circular_motion.alpha)]] rad/s^2
\end{eqnarray}
$$
$\alpha= $
return sf_math(namespace_circular_motion.alpha)
5%
Select unit for $\alpha$:
$m/s$
$Hz$
$rad$
$rad/s$
$rad/s^2$
4
rotation || moment_of_inertia
Exercise - Moment of inertia basic
if (int_count_times_randomized == 0){
return 1;
} else {
return random_min_max_precision(1, 10, 0); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 2;
} else {
return random_min_max_precision(-3, 3, 0); //defined in setup_exercise_all.js
}
return 0;
if (int_count_times_randomized == 0){
return 2;
} else {
return random_min_max_precision(1, 10, 0); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return -3;
} else {
return random_min_max_precision(-3, 3, 0); //defined in setup_exercise_all.js
}
return 0;
if (int_count_times_randomized == 0){
return 3;
} else {
return random_min_max_precision(1, 10, 0); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 1;
} else {
return random_min_max_precision(-3, 3, 0); //defined in setup_exercise_all.js
}
return 0;
if (int_count_times_randomized == 0){
return 1;
} else {
return random_min_max_precision(-3, 3, 0, false, -0.5, 0.5); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 6;
} else {
return random_min_max_precision(2, 10, 0); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 2;
} else {
return random_min_max_precision(2, 10, 0); //defined in setup_exercise_all.js
}
return (true);
Rotating a disc about the center.Rotating a disc about the edge.
[[
namespace_circular_motion.i_cm = 0.5 * ~m~ * ~r~*~r~;
namespace_circular_motion.i_edge = namespace_circular_motion.i_cm + ~m~ * ~r~*~r~;
return "";
]]
A disc of radius $r = ~r~ m$ and mass $m = ~m~ kg$ has moment of inertia about its center given by $I_{CM} = \frac{1}{2} m r^2$.
Calculate the moment of inertia $I_{CM}$.
Find the moment of inertia $I_{edge}$ if the axis of rotation is shifted to the edge.
We need to shift the axis by $d = r = ~r~ m$ to move it to the edge:
$$
\begin{eqnarray}
I_{edge} &=& \frac{1}{2} m r^2 + m d^2 \\
&=& \frac{1}{2} m r^2 + m r^2 \\
&=& \frac{3}{2} m r^2 \\
&=& \frac{3}{2} (~m~ kg) (~r~ m)^2 \\
&=& [[return sf_latex(namespace_circular_motion.i_edge)]] kgm^2
\end{eqnarray}
$$
if (int_count_times_randomized == 0){
return 6;
} else {
return random_min_max_precision(2, 10, 0); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 2;
} else {
return random_min_max_precision(2, 10, 0); //defined in setup_exercise_all.js
}
return (true);
Rotating a rod about the center.Rotating a rod about the edge.
[[
namespace_circular_motion.i_cm = (1/12) * ~m~ * ~l~*~l~;
namespace_circular_motion.i_edge = namespace_circular_motion.i_cm + ~m~ * (~l~/2)*(~l~/2);
return "";
]]
A rod of length $l = ~l~ m$ and mass $m = ~m~ kg$ has moment of inertia about its center given by $I_{CM} = \frac{1}{12} m l^2$.
Calculate the moment of inertia $I_{CM}$.
Find the moment of inertia $I_{edge}$ if the axis of rotation is shifted to the edge.
We need to shift the axis by $d = \frac{l}{2} = [[return sf_latex(~l~ / 2)]] m$ to move it to the edge:
$$
\begin{eqnarray}
I_{edge} &=& \frac{1}{12} m l^2 + m d^2 \\
&=& \frac{1}{12} m l^2 + m (\frac{l}{2})^2 \\
&=& \frac{1}{12} m l^2 + \frac{1}{4} m l^2 \\
&=& \frac{1}{3} m l^2 \\
&=& \frac{1}{3} (~m~ kg) (~l~ m)^2 \\
&=& [[return sf_latex(namespace_circular_motion.i_edge)]] kgm^2
\end{eqnarray}
$$
$I_{CM}= $
return sf_math(namespace_circular_motion.i_cm)
5%
$I_{edge}= $
return sf_math(namespace_circular_motion.i_edge)
5%
Select unit for moment of inertia:
$Nm$
$N$
$kgm$
$kgm^2$
$kgm/s$
3
rotation || moment_of_inertia || rotational_ke
Exercise - Rotational kinetic energy basic
if (int_count_times_randomized == 0){
return 1;
} else {
return random_min_max_precision(1, 10, 0); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 2;
} else {
return random_min_max_precision(-3, 3, 0); //defined in setup_exercise_all.js
}
return 0;
if (int_count_times_randomized == 0){
return 2;
} else {
return random_min_max_precision(1, 10, 0); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return -3;
} else {
return random_min_max_precision(-3, 3, 0); //defined in setup_exercise_all.js
}
return 0;
if (int_count_times_randomized == 0){
return 1;
} else {
return random_min_max_precision(-3, 3, 0); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 3;
} else {
return random_min_max_precision(2, 9, 0); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 6;
} else {
return random_min_max_precision(2, 10, 0); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 2;
} else {
return random_min_max_precision(2, 10, 0); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 2;
} else {
return random_min_max_precision(2, 5, 0); //defined in setup_exercise_all.js
}
return (true);
Rotating a disc about the center.
[[
namespace_circular_motion.i_cm = 0.5 * ~m~ * ~r~*~r~;
namespace_circular_motion.ke_rotational = 0.5*namespace_circular_motion.i_cm * ~omega~*~omega~;
return "";
]]
A disc of radius $r = ~r~ m$ and mass $m = ~m~ kg$ has moment of inertia about its center given by $I= \frac{1}{2} m r^2$.
Calculate the moment of inertia $I$.
Find the rotational kinetic energy $KE_{rot}$ if it rotates at $\omega = ~omega~ rad/s$.
Hint:
$KE_{rot} = \frac{1}{2} I \omega^2$.
Solution
$I$ about the center of mass
$$
\begin{eqnarray}
I &=& \frac{1}{2} m r^2 \\
&=& \frac{1}{2} (~m~ kg) (~r~ m)^2 \\
&=& [[return sf_latex(namespace_circular_motion.i_cm)]] kgm^2
\end{eqnarray}
$$
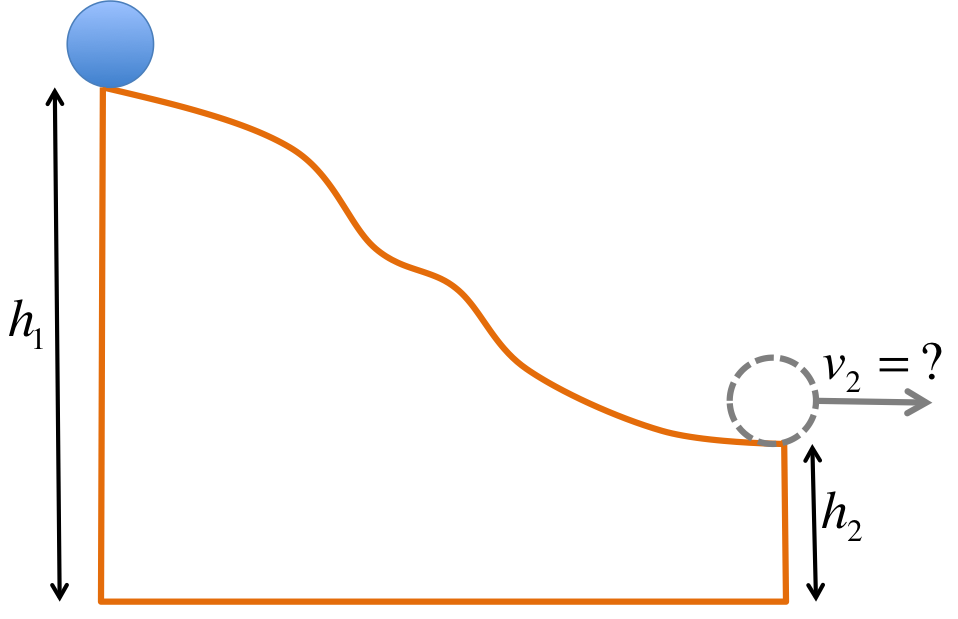
A sphere of mass $m$ and radius $r$ was initially at rest at the top of a hill as shown. Find its final speed when it rolled to the bottom of the hill. You will need $I_{\text{sphere}} = \frac{2}{5} m r^2$.
Solution
We will use conservation of energy. We must take into account the fact that it was rolling, meaning both linear \(KE\) and rotational \(KE\) are present:
Position
\(PE\)
\(KE_{\text{linear}}\)
\(KE_{\text{rotational}}\)
\(E_{\text{total}}\)
Top
\(mgh_1\)
\( 0 \)
\( 0 \)
\(mgh_1\)
Bottom
\(mgh_2\)
\( \frac{1}{2} m v_2^2 \)
\( \frac{1}{2} I \omega_2^2\)
\(mgh_2 + \frac{1}{2} m v_2^2 + \frac{1}{2} I \omega_2^2\)
Before equating the energy, however, we need to simplify the final \(KE_{\text{rotational}}\) in order to express everything in terms of \(v_2\):
$$
\begin{eqnarray}
KE_{\text{rotational}} &=& \frac{1}{2} I \omega_2^2 \\
&=& \frac{1}{2} (\frac{2}{5} m r^2) (\frac{v_2}{r})^2\\
&=& \frac{1}{5} m v_2^2
\end{eqnarray}
$$
This gives:
$$
\begin{eqnarray}
mgh_1 &=& mgh_2 + \frac{1}{2} m v_2^2 + \frac{1}{5} m v_2^2 \\
\Rightarrow mgh_1 - mgh_2 &=& \frac{7}{10} m v_2^2\\
\Rightarrow g(h_1 - h_2) &=& \frac{7}{10} v_2^2\\
v_2 &=& \sqrt{\frac{10}{7}g(h_1 - h_2) }
\end{eqnarray}
$$
Note that \(m\) and \(r\) both canceled out.
rotation || rotational_ke || energy
Exercise - Cylinder rolling down a hill
if (int_count_times_randomized == 0){
return 10;
} else {
return random_min_max_precision(7, 20, 0); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 3;
} else {
return random_min_max_precision(1, 5, 0); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 0.5;
} else {
return random_min_max_precision(0.1, 0.9, 1); //defined in setup_exercise_all.js
}
return (true);
Cylinder rolling down a hill
[[
namespace_circular_motion.v_2 = Math.sqrt((4/3)*(9.8)*(~h_1~ - ~h_2~) );
return "";
]]
A cylinder of mass $m$ and radius $r$ was initially at rest at the top of a hill as shown.
Given:
$h_1 = ~h_1~ m$.
$h_2 = ~h_2~ m$.
$r = ~r~ m$
Find its final speed $v$ when it rolled to the bottom of the hill. You will need $I_{\text{cylinder}} = \frac{1}{2} m r^2$.
Hint:
$mgh_1 = mgh_2 + \frac{1}{2} m v_2^2 + \frac{1}{2} I \omega_2^2$
Solution
First we work out the rotational $KE$:
$$
\begin{eqnarray}
KE_{\text{rotational}} &=& \frac{1}{2} I \omega_2^2 \\
&=& \frac{1}{2} (\frac{1}{2} m r^2) (\frac{v_2}{r})^2\\
&=& \frac{1}{4} m v_2^2
\end{eqnarray}
$$
Using $\frac{1}{4} m v_2^2$ as the final rotational kinetic energy:
$$
\begin{eqnarray}
mgh_1 &=& mgh_2 + \frac{1}{2} m v_2^2 + \frac{1}{2} I \omega_2^2 \\
\Rightarrow mgh_1 &=& mgh_2 + \frac{1}{2} m v_2^2 + \frac{1}{4} m v_2^2 \\
\Rightarrow mgh_1 - mgh_2 &=& \frac{3}{4} m v_2^2\\
\Rightarrow g(h_1 - h_2) &=& \frac{3}{4} v_2^2\\
v_2 &=& \sqrt{\frac{4}{3}g(h_1 - h_2) } \\
&=& \sqrt{\frac{4}{3}(9.8)(~h_1~ - ~h_2~) } \\
&=& [[return sf_latex(namespace_circular_motion.v_2)]] m/s
\end{eqnarray}
$$
Angular velocity
We can then use \(\omega = \frac{v}{r}\):
$$
\begin{eqnarray}
\omega_2 &=& \frac{[[return sf_latex(namespace_circular_motion.v_2)]] m/s}{~r~ m} \\
&=& [[return sf_latex(namespace_circular_motion.v_2/~r~)]] rad/s
\end{eqnarray}
$$
$v_2= $
return sf_math(namespace_circular_motion.v_2)
5%
$m/s$ $\omega_2= $
return sf_math(namespace_circular_motion.v_2/~r~)
5%
$rad/s$
circular_motion || rotation || vector
Exercise - Circular motion in $\hat i$, $\hat j$
if (int_count_times_randomized == 0){
return 3;
} else {
return random_min_max_precision(2, 10, 0); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 2;
} else {
return random_min_max_precision(1.1, 5, 1); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 1.2;
} else {
return random_min_max_precision(2, 20, 1); //defined in setup_exercise_all.js
}
return (true);
An object moves in the counter-clockwise direction around a circle of radius $R = ~R~ m$ at $~omega~ rad/s$, starting from the positive $x$-axis at $0s$. Express your answers below for the object at $t = ~t~ s$ in terms of $\hat i$ and $\hat j$.
What is the total angle traveled during $~t~ s$ in radians?
What is the total angle in degrees?
Find the position vector (assuming the origin is at the center of circle).
Find the velocity vector.
Find the acceleration vector.
Sketch a picture showing the directions of the three vectors above. The lengths of the vectors can be arbitray .
theta = ~omega~ * ~t~;
theta_in_degree = theta * 180 / Math.PI;
theta_in_degree_remainder = theta_in_degree % 360;
s = new Class_Vector(~R~ * Math.cos(theta), ~R~ * Math.sin(theta));
v = new Class_Vector(-1 * ~omega~ * ~R~ * Math.sin(theta), ~omega~ * ~R~ * Math.cos(theta));
a = s.times_scalar(-1 * ~omega~ * ~omega~);
Hint:
$$
\begin{eqnarray}
\theta &=& \omega t \\
\vec s &=& R \cos \theta \hat i + R \sin \theta \hat j
\end{eqnarray}
$$
Solution
The directions of $\vec s$. Not to scale.
The directions of $\vec v$ and $\vec a$. Not to scale.
Angle
In radians:
$$
\begin{eqnarray}
\theta &=& \omega t = (~omega~ rad/s) (~t~ s) \\
&=& [[return sf_latex(theta)]] rad
\end{eqnarray}
$$
In degrees:
$$
\begin{eqnarray}
\theta &=& [[return sf_latex(theta)]] (\frac{180^\circ}{\pi}) \\
&=& [[return sf_latex(theta_in_degree)]] ^\circ
\end{eqnarray}
$$
Taking out multiples of $360^\circ$, we have the angle $[[return sf_latex(theta_in_degree_remainder)]] ^\circ$.
Position
$$
\begin{eqnarray}
\vec s &=& R \cos \omega t \hat i + R \sin \omega t \hat j \\
&=& R \cos \theta \hat i + R \sin \theta \hat j \\
&=& ([[return s.string_latex(2, false)]]) m
\end{eqnarray}
$$
Velocity
$$
\begin{eqnarray}
\vec v &=& \frac{d \vec s}{dt} \\
&=& \frac{d}{dt} (R \cos \omega t \hat i + R \sin \omega t \hat j) \\
&=& -\omega R \sin \omega t \hat i + \omega R \cos \omega t \hat j \\
&=& -\omega R \sin \theta \hat i + \omega R \cos \theta \hat j \\
&=& ([[return v.string_latex(2, false)]]) m/s
\end{eqnarray}
$$
Acceleration
$$
\begin{eqnarray}
\vec a &=& \frac{d \vec v}{dt} \\
&=& \frac{d}{dt} (-\omega R \sin \omega t \hat i + \omega R \cos \omega t \hat j) \\
&=& -\omega^2 R \cos \omega t \hat i - \omega^2 R \sin \omega t \hat j \\
&=& -\omega^2 R \cos \theta \hat i - \omega^2 R \sin \theta \hat j \\
&=& -\omega^2 \vec s \\
&=& ([[return a.string_latex(2, false)]]) m/s^2
\end{eqnarray}
$$
$\theta = $
return sf_math(theta)
5%
$rad = $
return sf_math(theta_in_degree)
5%
$^\circ$ $\vec s = ($
return sf_math(s.x)
5%
$\hat i +$
return sf_math(s.y)
5%
$\hat j) m$ $\vec v = ($
return sf_math(v.x)
5%
$\hat i +$
return sf_math(v.y)
5%
$\hat j) m/s$ $\vec a = ( $
return sf_math(a.x)
5%
$\hat i +$
return sf_math(a.y)
5%
$\hat j) m/s^2$
rotation || moment_of_inertia
Exercise - Moment of inertia of six masses
if (int_count_times_randomized == 0){
return 10;
} else {
return random_min_max_precision(5, 20, 0); //defined in setup_exercise_all.js
}
if (int_count_times_randomized == 0){
return 3;
} else {
return random_min_max_precision(3, 10, 0); //defined in setup_exercise_all.js
}
return (true);
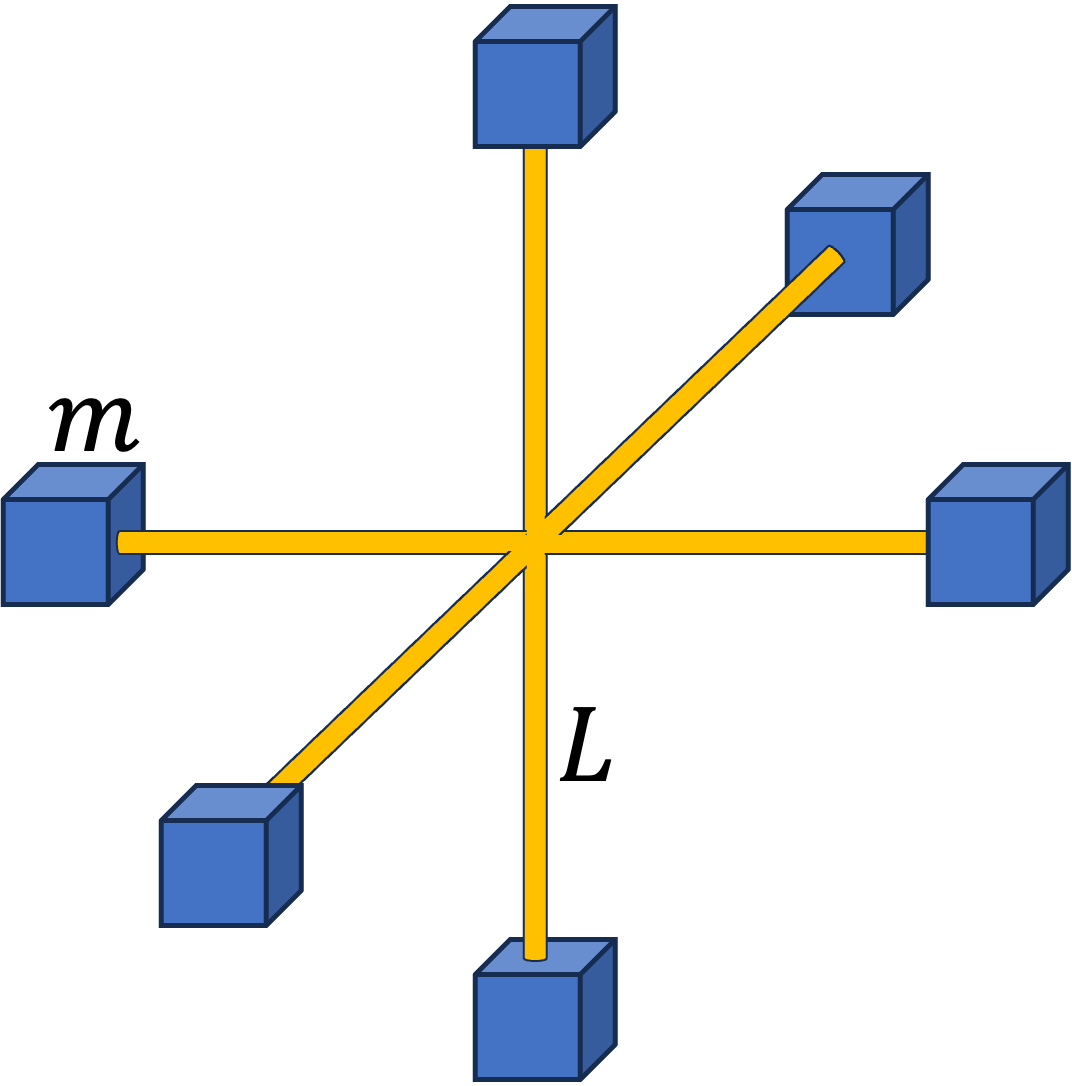
Six small masses, each of mass $m = ~m~ kg$, are placed at the $x$, $y$, $z$-axes at $\pm L$ (where $L = ~L~ m$) as shown. You can ignore the mass of the bars connected the masses, as well as the size of the masses (i.e. assume they are point masses).
What is the moment of inertia of this system about an the $z$-axis?
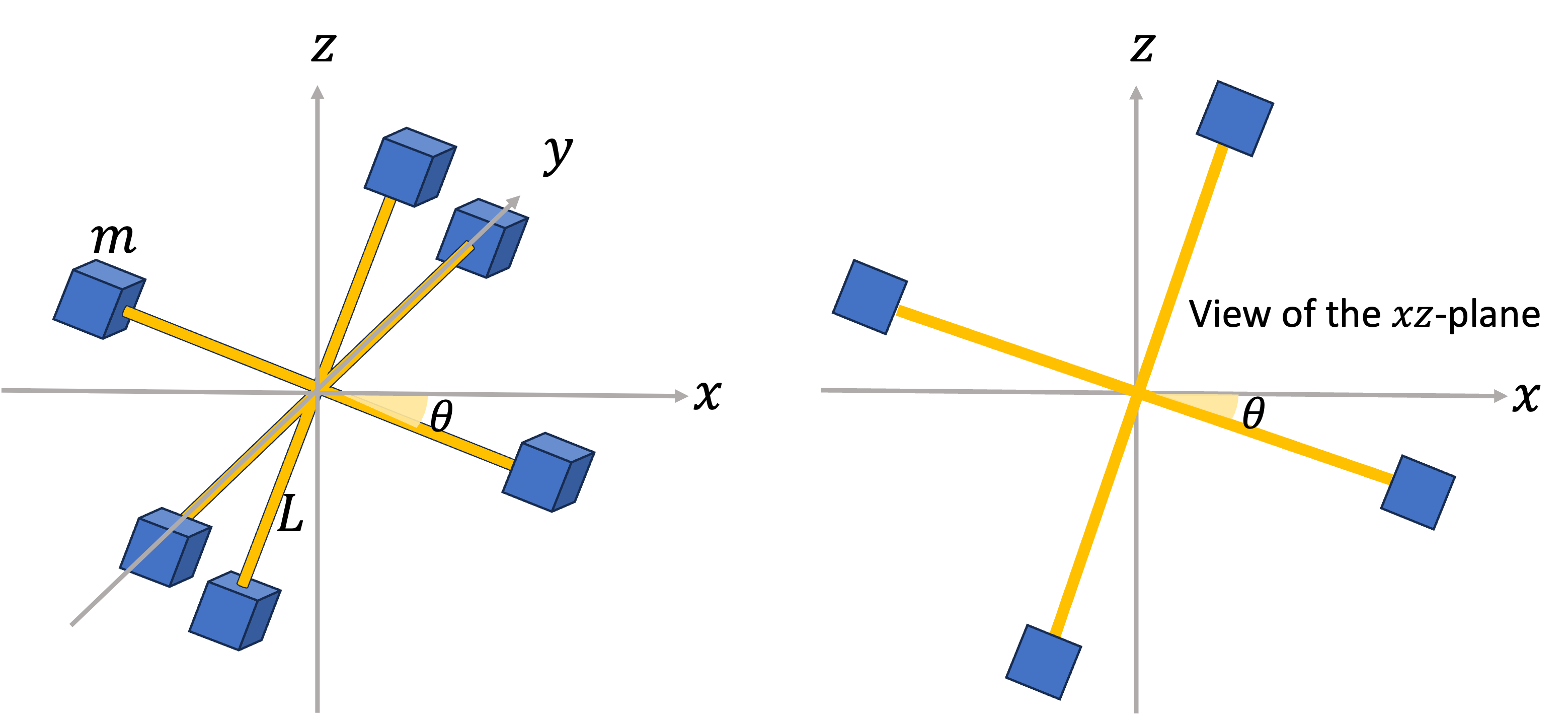
Suppose the object is now rotated about the $y$ by an angle $\theta$. What is the new moment of inertia about the $z$-axis after the rotation?
(a) Six tiny masses along the axes at $\pm ~L~ m$.
(b) Rotated about the $y$ by an angle $\theta$. The two masses on the $y$-axis remain at the same location.
Hint:
$I = \sum_i m_i r^2$
$r^2 = x^2 + y^2$, where $r$ is the distance of each mass from the axis of rotation ($z$-axis in this case)
I = 4 * ~m~ * ~L~ * ~L~; // Calculations here.
Solution
Before rotation by $\theta$
We use $I = \sum_i m_i r^2$, where $r$ is the distance of each mass from the axis of rotation ($z$-axis in this case):
The two masses on the $z$-axis makes no contribution because their distance to the $z$-axis is zero (i.e., $r = 0$) since they are already on the $z$-axis.
The other four masses along the $x$-axis and the $y$-axis each has distance $r$ from the $z$-axis is given by $r = L$.
The moment of inertia of the system about the $z$-axis is given by:
$$
\begin{eqnarray}
I &=& \sum_i m_i r^2 \\
&=& 2 m (0)^2 + 4 m L^2 \\
&=& 4 m L ^2 \\
&=& 4 (~m~ kg) (~L~ m)^2 \\
&=& [[return sf_latex(I)]] \mathrm{kg m^2}
\end{eqnarray}
$$
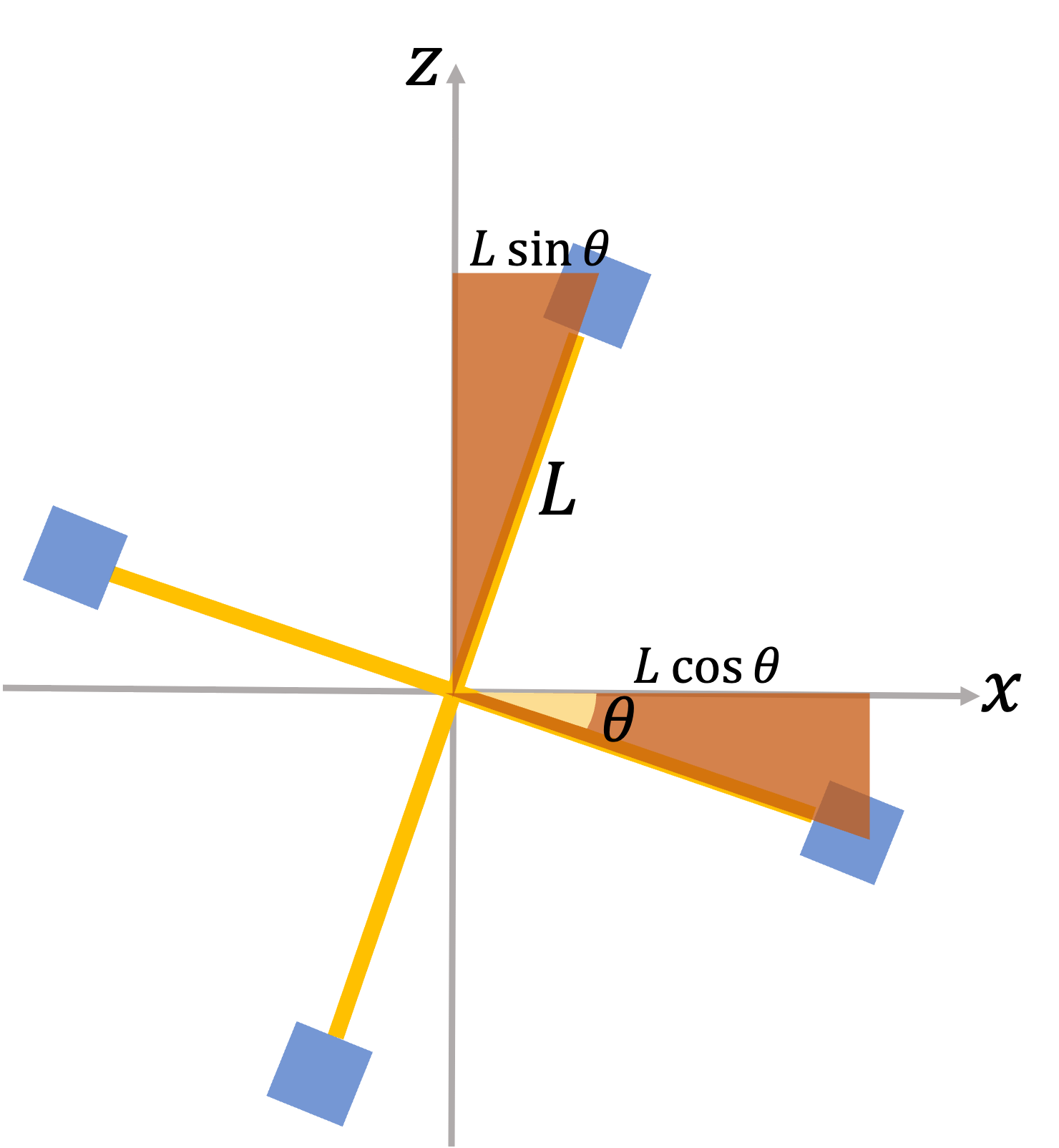
The distances of four of the masses from the $z$-axis are now $L \cos \theta$ and $L \sin \theta$.
After rotation by $\theta$
From the figure, we see that after rotation by an angle $\theta$ about the $y$-axis:
The distances of the two masses on the $y$-axis from the $z$-axis remains $L$.
The distance of the two masses that used to be on the $x$-axis from the $z$-axis is now $L \cos \theta$.
The distance of the two masses that used to be on the $z$-axis from the $y$-axis is now $L \sin \theta$.
The moment of inertia of the system about the $z$-axis is given by:
$$
\begin{eqnarray}
I &=& \sum_i m_i r^2 \\
&=& 2 m L^2 + 2 m (L \cos \theta)^2 + 2 m (L \sin \theta)^2 \\
&=& 2 m L^2 + 2 m L (\cos^2 \theta + \sin^2 \theta) \\
&=& 4 m L ^2 \\
&=& 4 (~m~ kg) (~L~ m)^2 \\
&=& [[return sf_latex(I)]] \mathrm{kg m^2}
\end{eqnarray}
$$
Interestingly, the moment of inertia about the $z$-axis remains the same after rotation about the $y$-axis. This is explained in the section on the moment of inertia tensor below. It turns out the moment of inertia tensor of this object is proportional the identity matrix and is there independent of the orientation of the object.
Before rotation about the $y$-axis: $I = $
return sf_math(I)
5%
After rotation about the $y$-axis: $I = $
return sf_math(I)
5%
Select unit for $I$:
$N/s$
$kg m^2/s^2$
$J$
$kg m^2$
3
rotation || moment_of_inertia
Example - Moment of inertia of a thin square
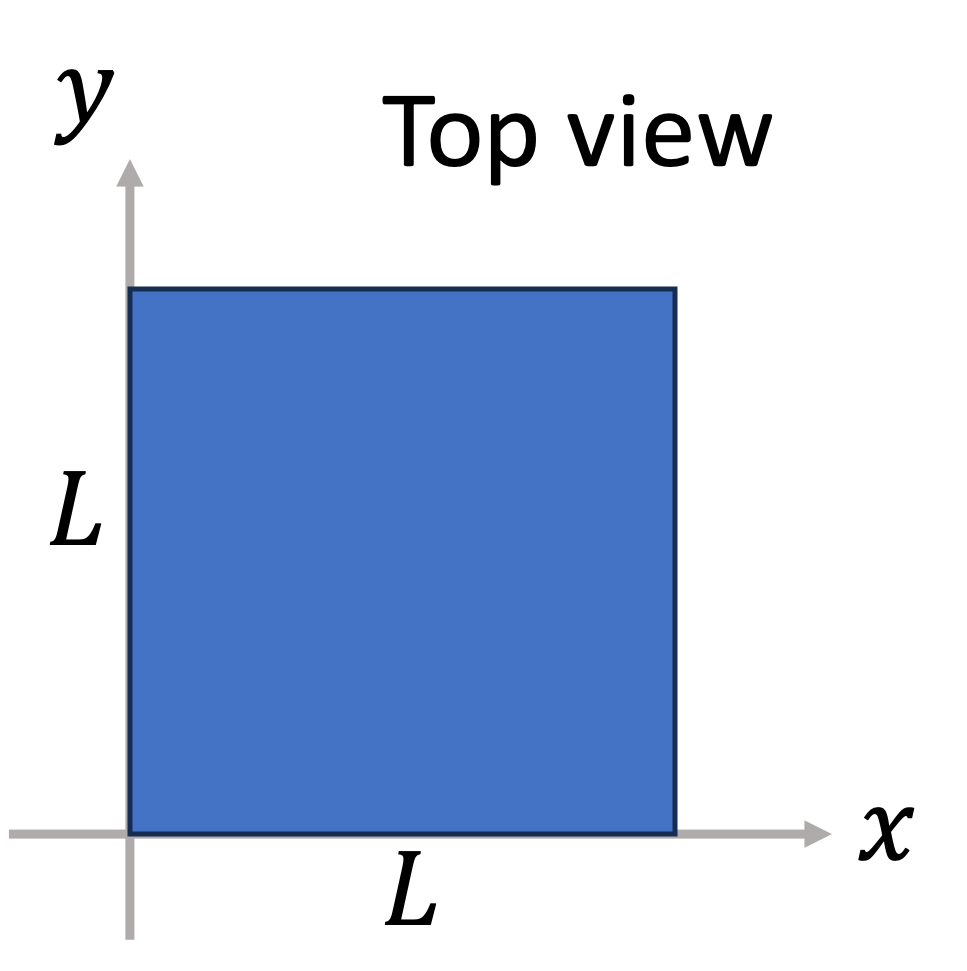
A thin square on the $xy$-plane.
A thin square of side length $L$ and uniform mass $M$ lies on the $xy$-plane as shown.
Calculate its moment of inertia about the $z$-axis through the origin.
Suppose the axis of rotation is shifted to the center of the square (while still being perpendicular to the plane). Calculate the new moment of inertia $I_{CM}$ by changing the limits of integration.
Use the parallel axis theorem and the result from part (a) to recalculate the moment of inertia $I_{CM}$ about the center. You should get the same answer as in part (b).
Solution
$I$ through the origin
We use $I = \int r^2 dm$, where $r$ is the distance of each mass element from the axis of rotation ($z$-axis in this case). We have $dm = \frac{M}{L^2} dA$ (note that $\frac{M}{L^2}$ is the mass per unit area) and $dA = dx dy$ is the area element. Therefore, we have:
$$
\begin{eqnarray}
I &=& \int r^2 dm \\
&=& \int (x^2 + y^2) \frac{M}{L^2} dA \\
&=& \frac{M}{L^2} \int_0^L \int_0^L (x^2 + y^2) dx dy \\
&=& \frac{M}{L^2} \left[ \int_0^L x^2 dx \int_0^L dy + \int_0^L y^2 dy \int_0^L dx \right] \\
&=& \frac{M}{L^2} \left[ \frac{L^3}{3} \cdot L + \frac{L^3}{3} \cdot L \right] \\
&=& \frac{2}{3} M L^2 \\
\end{eqnarray}
$$
$I$ through the center of the square
Now, we shift the axis of rotation to the center of the square. The limits of integration now change to $-\frac{L}{2}$ to $\frac{L}{2}$ for both $x$ and $y$. Therefore, we have:
$$
\begin{eqnarray}
I_{CM} &=& \int r^2 dm \\
&=& \int (x^2 + y^2) \frac{M}{L^2} dA \\
&=& \frac{M}{L^2} \int_{-L/2}^{L/2} \int_{-L/2}^{L/2} (x^2 + y^2) dx dy \\
&=& \frac{M}{L^2} \left[ \int_{-L/2}^{L/2} x^2 dx \int_{-L/2}^{L/2} dy + \int_{-L/2}^{L/2} y^2 dy \int_{-L/2}^{L/2} dx \right] \\
&=& \frac{M}{L^2} \left[ \frac{(L/2)^3 - (-L/2)^3}{3} \cdot L + \frac{(L/2)^3 - (-L/2)^3}{3} \cdot L \right] \\
&=& \frac{M}{L^2} \left[ \frac{L^4}{12} + \frac{L^4}{12} \right] \\
&=& \frac{1}{6} M L^2 \\
\end{eqnarray}
$$
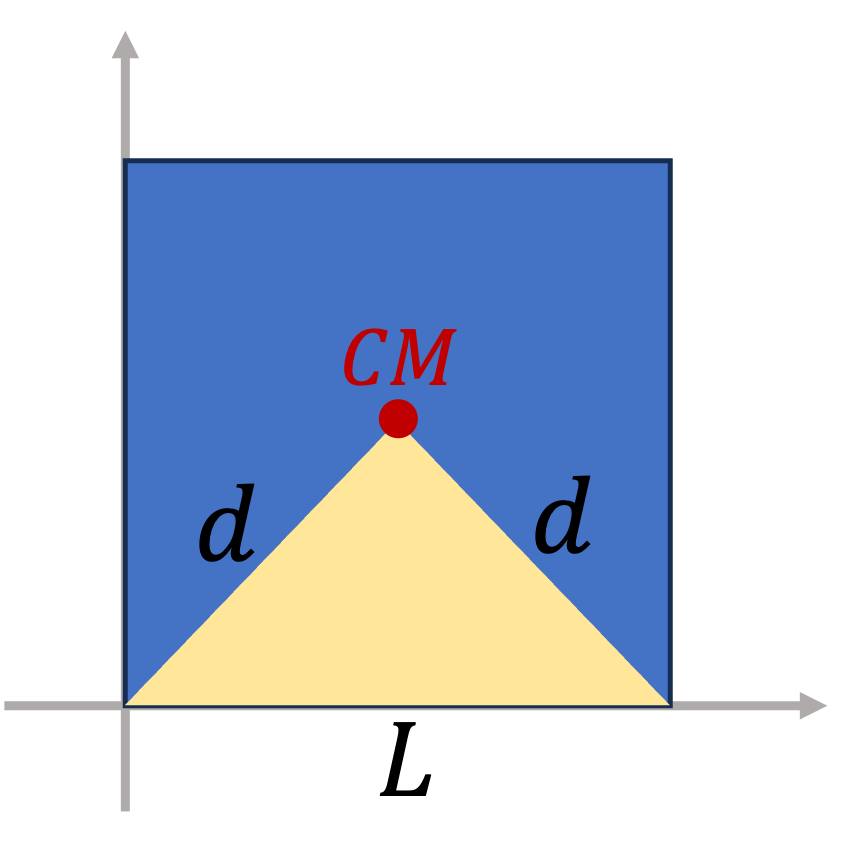
The distance from the center to a corner is $d = \frac{L}{\sqrt{2}}$.
Using the parallel axis theorem
The parallel axis theorem states that if the moment of inertia about an axis through the center of mass is $I_{CM}$, then the moment of inertia about a parallel axis a distance $d$ away is given by:
$$
I = I_{CM} + M d^2
$$
In our case, we have $I = \frac{2}{3} M L^2$ from part (a), and $d = L \sin 45^\circ = \frac{L}{\sqrt{2}}$ (or you can show using the Pythagorean theorem $d^2 + d^2 = L^2$). Therefore, we have:
$$
\begin{eqnarray}
I_{CM} &=& I - M d^2 \\
&=& \frac{2}{3} M L^2 - M \left(\frac{L}{\sqrt{2}}\right)^2 \\
&=& \frac{2}{3} M L^2 - \frac{1}{2} M L^2 \\
&=& (\frac{4}{6} - \frac{3}{6}) M L^2 \\
&=& \frac{1}{6} M L^2 \\
\end{eqnarray}
$$
This is the same result as in part (b).
rotation || moment_of_inertia
Example - Moment of inertia of a thin triangle
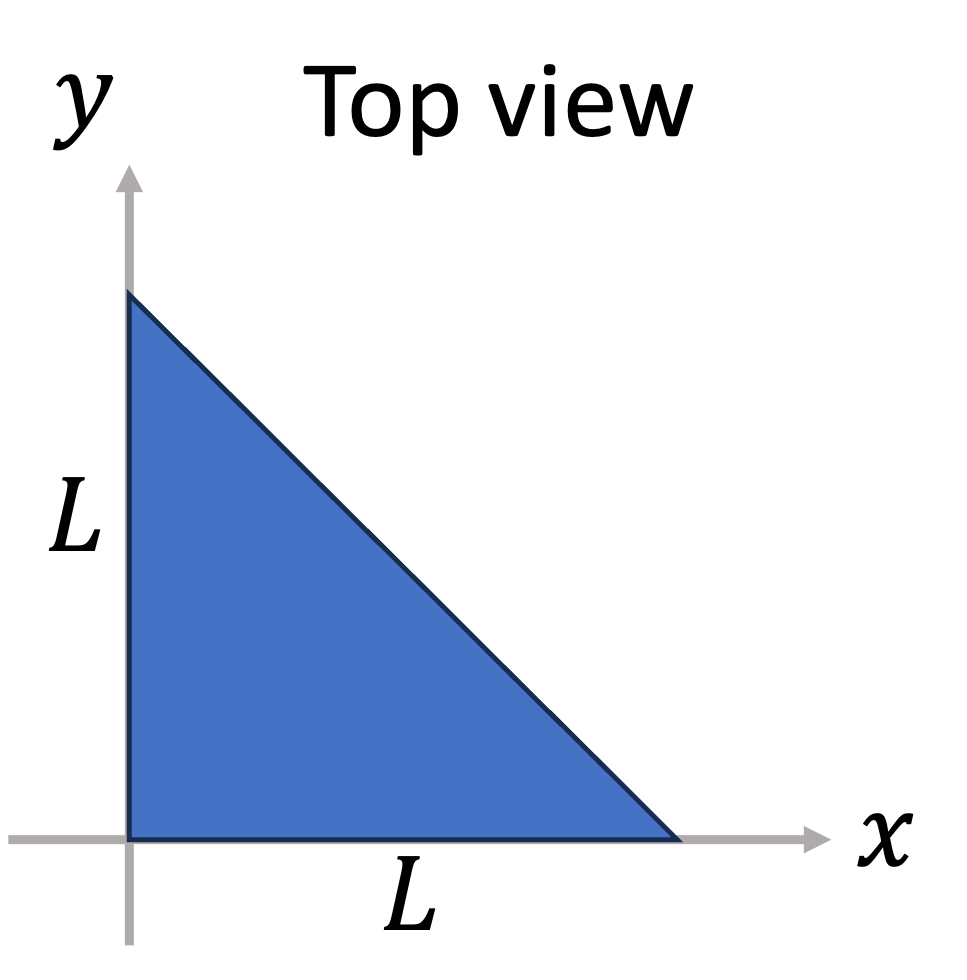
(a) A thin triangle on the $xy$-plane.
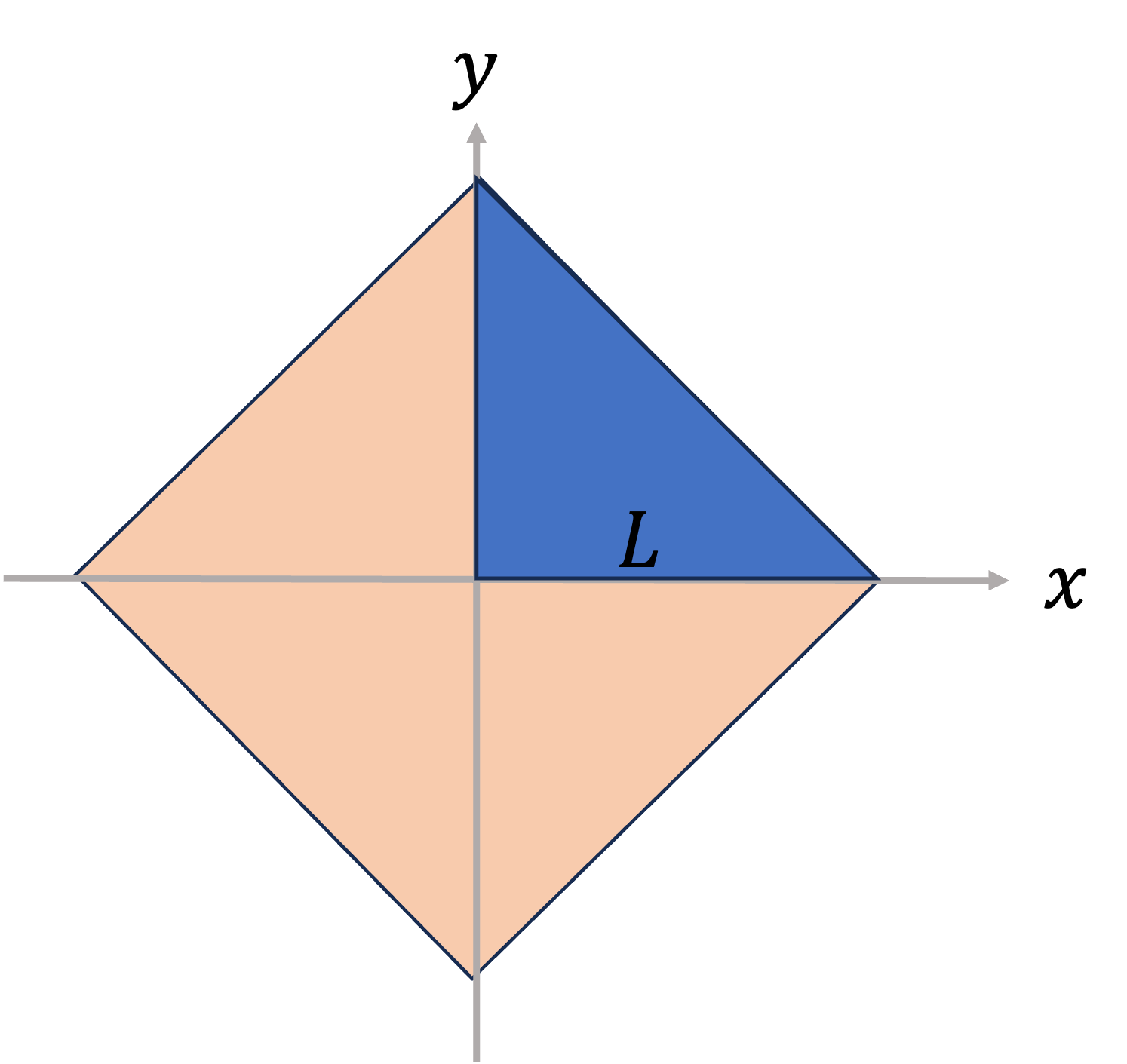
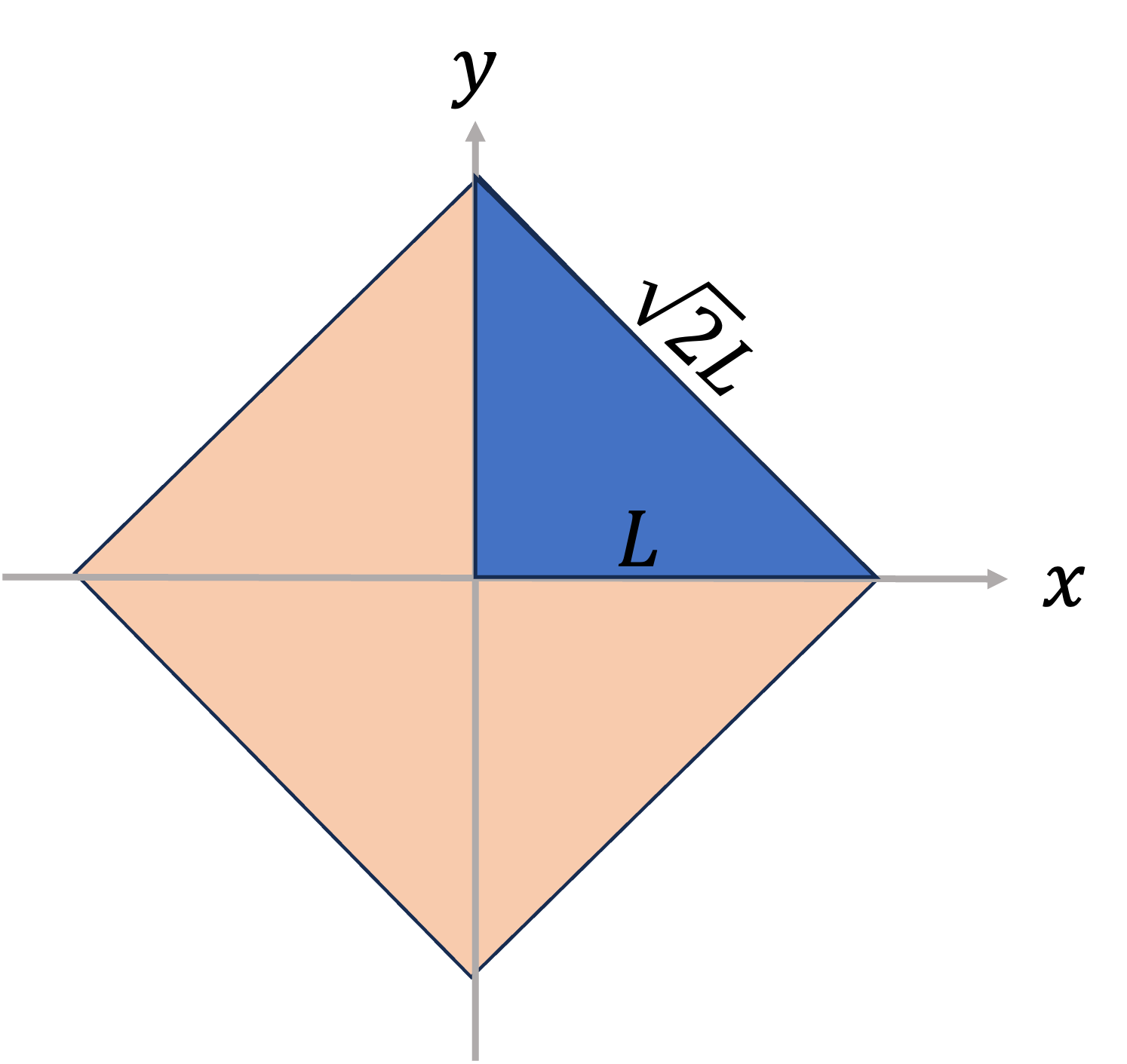
(b) The triangle as $1/4$ of a square.
[This question will not be on the exam because it involves integration techniques on multiple integratals that are not typically covered until Calculus III.]
A thin right triangle of base length $L$ and height $L$ and uniform mass $M$ lies on the $xy$-plane as shown.
Calculate its moment of inertia about the $z$-axis through the origin using direct integration.
Calculate its moment of inertia about the $z$-axis through the origin by viewing the triangle as $1/4$ of a square (see figure). You can use the result for the moment of inertia of a thin square of mass $M_{square}$ and length $L_{square}$ through the center of mass as $I_{square} = \frac{1}{6} M_{square} L_{square}^2$.
Solution
$I$ through the origin
We use $I = \int r^2 dm$, where $r$ is the distance of each mass element from the axis of rotation ($z$-axis in this case). The total area of the triangle is $A = \frac{1}{2} L^2$. We have $dm = \frac{M}{A} dA = \frac{M}{L^2/2} dA = \frac{2 M}{L^2} dA$ (note that $\frac{M}{A}$ is the mass per unit area) and $dA = dx dy$ is the area element. Therefore, we have:
$$
\begin{eqnarray}
I &=& \int r^2 dm \\
&=& \int (x^2 + y^2) \frac{2 M}{L^2} dA \\
&=& \frac{2 M}{L^2} \int (x^2 + y^2) dA \\
&=& \frac{2 M}{L^2} \left[ \int x^2 dA + \int y^2 dA \right]
\end{eqnarray}
$$
The two integrals are equal due to symmetry (if you switch $x$ and $y$ the triangle and the area element remain unchanged), so we only need to calculate one of them and then double the result. We choose to calculate $\int x^2 dA$. The limits of integration for $x$ is from $0$ to $L$, and for each fixed $x$, the limits of integration for $y$ is from $0$ to $L - x$. Therefore, we have:
$$
\begin{eqnarray}
\int x^2 dA &=& \int_{x=0}^L \left( \int_{y=0}^{L-x} x^2 dy \right) dx \\
&=& \int_{0}^{L} x^2 (L-x) dx \\
&=& \int_{0}^{L} (L x^2 - x^3) dx \\
&=& \left[ \frac{L x^3}{3} - \frac{x^4}{4} \right]_0^L \\
&=& \frac{L^4}{3} - \frac{L^4}{4} \\
&=& \frac{1}{12} L^4
\end{eqnarray}
$$
Therefore, we have:
$$
\begin{eqnarray}
I &=& \frac{M}{L^2} \left[ \int x^2 dA + \int y^2 dA \right] \\
&=& \frac{2 M}{L^2} \left[ 2 \int x^2 dA \right] \\
&=& \frac{2 M}{L^2} \left[ 2 \cdot \frac{1}{12} L^4 \right] \\
&=& \frac{1}{3} M L^2
\end{eqnarray}
$$
Integration by brute force
Alternatively, we can calculate $I$ by directly evaluating the double integral without using symmetry. We have:
$$
\begin{eqnarray}
I &=& \int r^2 dm \\
&=& \int (x^2 + y^2) \frac{M}{L^2} dA \\
&=& \frac{2 M}{L^2} \int_{x=0}^L \left( \int_{y=0}^{L-x}(x^2 + y^2) dy \right) dx \\
&=& \frac{2 M}{L^2} \left[ \int_{0}^{L} \left( x^2 (L-x) + \frac{(L-x)^3}{3} \right) dx \right] \\
&=& \frac{2 M}{L^2} \left[ \int_{0}^{L} \left( L x^2 - x^3 + \frac{L^3 - 3L^2 x + 3L x^2 - x^3}{3} \right) dx \right] \\
&=& \frac{2 M}{L^2} \left[ \int_{0}^{L} \left( \frac{L^3}{3} - L^2 x + 2 L x^2 - \frac{4}{3} x^3 \right) dx \right] \\
&=& \frac{2 M}{L^2} \left[ (\frac{1}{3} - \frac{1}{2} + \frac{2}{3} - \frac{1}{3}) L^4 \right] \\
&=& \frac{1}{3} M L^2
\end{eqnarray}
$$
The triangle as $1/4$ of a square. The length of the square is $L_{square} = \sqrt{2} L$.
As $1/4$ of a square
We can view the triangle as $1/4$ of a square of side length $L$ as shown in the figure. The mass of the square is $M_{square} = 4 M_{triangle} = 4 M$, and the length of the square is $L_{square} = \sqrt{2} L$. The moment of inertia of the square about its center is:
$$
\begin{eqnarray}
I_{square} &=& \frac{1}{6} M_{square} L_{square}^2 \\
&=& \frac{1}{6} (4 M) (\sqrt{2} L)^2 \\
&=& \frac{1}{6} (4 M) (2 L^2) \\
&=& \frac{4}{3} M L^2
\end{eqnarray}
$$
Since the triangle is $1/4$ of the square, its moment of inertia about the same axis is:
$$
I_{triangle} = \frac{1}{4} I_{square} = \frac{1}{4} \cdot \frac{4}{3} M L^2 = \frac{1}{3} M L^2
$$
This is the same result as in part (a).
rotation || moment_of_inertia
Example - Moment of inertia of six masses (tensor version)
Six small masses, each of mass $m$, are placed at the $x$, $y$, $z$-axes at $\pm L$ as shown. You can ignore the mass of the bars connected the masses, as well as the size of the masses (i.e. assume they are point masses). What is the moment of inertia tensor of this system?
Six tiny masses along the axes at $\pm ~L~ m$.
Solution
$I_{zz}$
We use $I_{zz} = \sum_i m_i (x^2 + y^2)$, where $i$ sums over the six masses. Note that $x^2 + y^2$ is the square of distance of each mass from the axis of rotation ($z$-axis in this case).
$$
\begin{eqnarray}
I_{zz} &=& \sum_i m_i (x^2 + y^2) \\
&=& 2 m (L^2 + 0^2) + 2 m (0^2 + L^2) + 2 m (0^2 + 0^2) \qquad \text{Contribution from masses on the $x$, $y$, and $z$ axes respectively} \\
&=& 4 m L ^2 \\
\end{eqnarray}
$$
Note that there are two masses on each axis, hence the factor of 2 in front of each term. The two masses on the $z$-axis makes no contribution because their distance to the $z$-axis is zero (i.e., $x = 0$ and $y = 0$) since they are already on the $z$-axis.
$I_{xx}$ and $I_{yy}$
By symmetry, we have:
$$
I_{xx} = I_{yy} = I_{zz} = 4 m L^2
$$
Off-diagonal terms
$$
I_{xy} = I_{yx} = - \sum_i m_i x_i y_i = 0
$$
It is zero because for the masses at $x = \pm L$, $y = 0$. For the masses at $y = \pm L$, $x = 0$. Hence, all terms in the sum are zero.
Similar argument means all off-diagonal terms are zero:
$$
\begin{eqnarray}
I_{xy} &=& I_{yx} = - \sum_i m_i x_i y_i = 0 \\
I_{xz} &=& I_{zx} = - \sum_i m_i x_i z_i = 0 \\
I_{yz} &=& I_{zy} = - \sum_i m_i y_i z_i = 0 \\
\end{eqnarray}
$$
Moment of inertia tensor
Therefore, the moment of inertia tensor is given by:
$$
\mathbf{I} = \begin{bmatrix}
I_{xx} & I_{xy} & I_{xz} \\
I_{yx} & I_{yy} & I_{yz} \\
I_{zx} & I_{zy} & I_{zz} \\
\end{bmatrix} = \begin{bmatrix}
4 m L^2 & 0 & 0 \\
0 & 4 m L^2 & 0 \\
0 & 0 & 4 m L^2 \\
\end{bmatrix} = 4 m L^2 \begin{bmatrix}
1 & 0 & 0 \\
0 & 1 & 0 \\
0 & 0 & 1 \\
\end{bmatrix} = 4 m L^2 \mathbf{I_3}
$$
where $\mathbf{I_3}$ is the $3 \times 3$ identity matrix. This means the moment of inertia tensor is proportional to the identity matrix, and is therefore independent of the orientation of the object. This explains why in a previous exercise, the moment of inertia about the $z$-axis remained the same after rotation about the $y$-axis.
rotation || moment_of_inertia
Example - Moment of inertia of a thin square (tensor version)
A thin square on the $xy$-plane.
A thin square of side length $L$ and uniform mass $M$ lies on the $xy$-plane as shown. Calculate its moment of inertia tensor.
Solution
$I_{zz}$
We use $I_{zz} = \int (x^2 + y^2) dm$, where $x^2 + y^2$ is the square of the distance of each mass element from the axis of rotation ($z$-axis in this case). We have $dm = \frac{M}{L^2} dA$ (note that $\frac{M}{L^2}$ is the mass per unit area) and $dA = dx dy$ is the area element. Therefore, we have:
$$
\begin{eqnarray}
I_{zz} &=& \int (x^2 + y^2) \frac{M}{L^2} dA \\
&=& \frac{M}{L^2} \int_0^L \int_0^L (x^2 + y^2) dx dy \\
&=& \frac{M}{L^2} \left[ \int_0^L x^2 dx \int_0^L dy + \int_0^L y^2 dy \int_0^L dx \right] \\
&=& \frac{M}{L^2} \left[ \frac{L^3}{3} \cdot L + \frac{L^3}{3} \cdot L \right] \\
&=& \frac{2}{3} M L^2 \\
\end{eqnarray}
$$
By symmetry, we have:
$$
I_{yy} = I_{xx} = \frac{1}{3} M L^2
$$
Off-diagonal terms
Because both $I_{xz} = I_{zx} = - \int xz dm $ involves $z = 0$ (the plane of the square), we have:
$$
I_{xz} = I_{zx} = 0
$$
For $I_{xy} = I_{yx} = - \int xy dm$, we have:
$$
\begin{eqnarray}
I_{xy} &=& - \int xy dm \\
&=& - \frac{M}{L^2} \int_0^L \int_0^L xy dx dy \\
&=& - \frac{M}{L^2} \int_0^L x dx \int_0^L y dy \\
&=& - \frac{M}{L^2} \frac{L^2}{2} \cdot \frac{L^2}{2} \\
&=& - \frac{1}{4} M L^2
\end{eqnarray}
$$
Moment of inertia tensor
Therefore, the moment of inertia tensor is given by:
$$
\mathbf{I} = \begin{bmatrix}
I_{xx} & I_{xy} & I_{xz} \\
I_{yx} & I_{yy} & I_{yz} \\
I_{zx} & I_{zy} & I_{zz} \\
\end{bmatrix} = \begin{bmatrix}
\frac{1}{3} M L^2 & - \frac{1}{4} M L^2 & 0 \\
- \frac{1}{4} M L^2 & \frac{1}{3} M L^2 & 0 \\
0 & 0 & \frac{2}{3} M L^2 \\
\end{bmatrix} = M L^2 \begin{bmatrix}
\frac{1}{3} & - \frac{1}{4} & 0 \\
- \frac{1}{4} & \frac{1}{3} & 0 \\
0 & 0 & \frac{2}{3} \\
\end{bmatrix}
$$
rotation || moment_of_inertia
Example - Moment of inertia of a tetrahedron (tensor version)
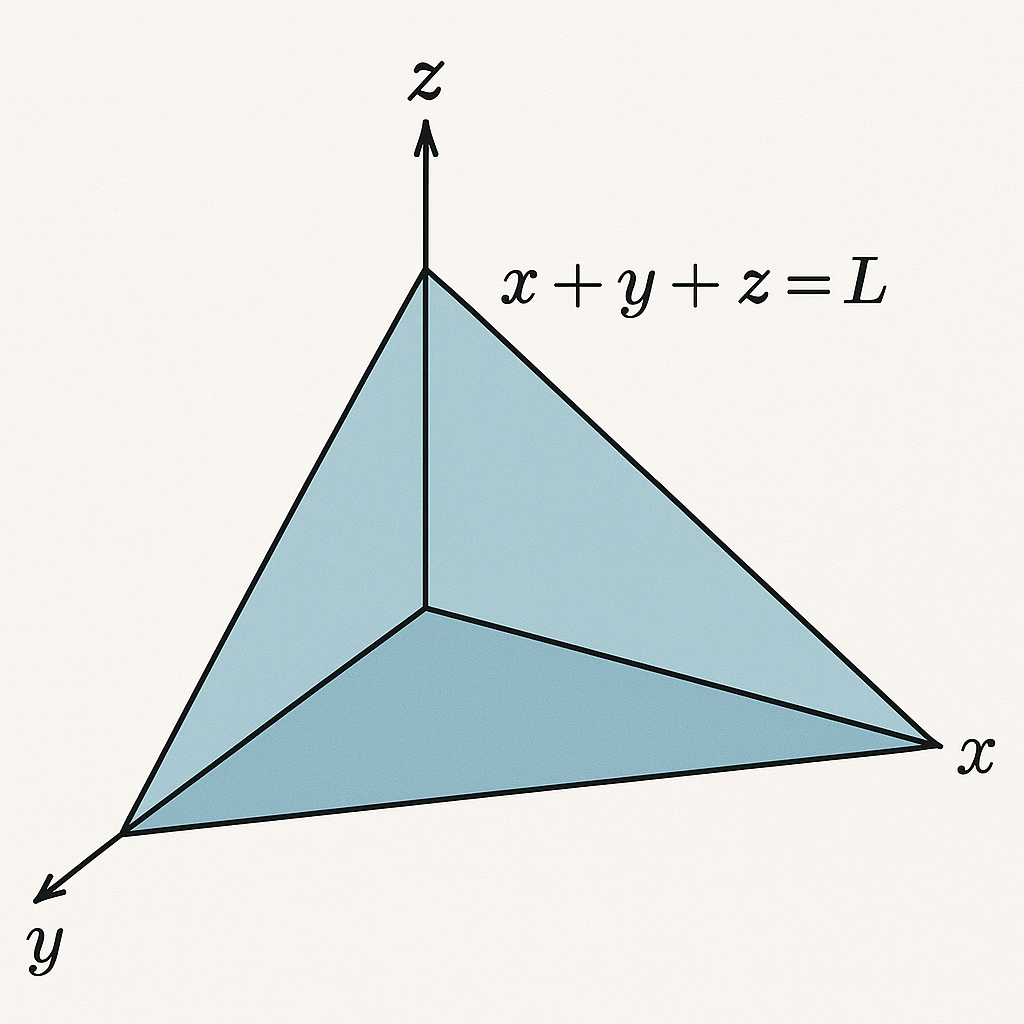
A tetrahedron bounded by the planes $x=0$, $y=0$, and $z=0$ and $x + y + z = L$.
A tetrahedron with a uniform mass distribution with total mass $M$ and a height of $L$ is shown. We wish to calculate its moment of inertia tensor, but a brute force approach will require some tedious integrations, so we will try to be a little cleverer than Musk to save some work by assuming $L = 1$ and $M=1$ (which can be restored in the end) and following the steps below:
Evaluate the integral $F(m, n) = \int x^m y^n dV$ over the volume of the tetrahedron. You can use the result from the beta function $B(a+1, b+1) = \int_0^1 x^{a} (1-x)^{b} dx = \frac{a! b!}{(a+b+1)!}$. All integrals you need below are of this form.
Calculate the volume of the tetrahedron.
Calculate the density $\rho$ of the tetrahedron.
Calculate the diagonal terms $I_{zz}$, $I_{xx}$ and $I_{yy}$.
The volume of the tetrahedron is given by:
$$
\begin{eqnarray}
V &=& \int dV = F(0,0) = \frac{0! 0!}{(0+0+3)!} = \frac{1}{6}
\end{eqnarray}
$$
Density of the tetrahedron
The density of the tetrahedron is given by:
$$
\begin{eqnarray}
\rho &=& \frac{M}{V} = \frac{1}{1/6} = 6
\end{eqnarray}
$$
$I_{zz}$
We use $I_{zz} = \int (x^2 + y^2) dm$, where $x^2 + y^2$ is the square of the distance of each mass element from the axis of rotation ($z$-axis in this case). We have $dm = \rho dV$ and $dV = dx dy dz$ is the volume element. Therefore, we have:
$$
\begin{eqnarray}
I_{zz} &=& \int (x^2 + y^2) \rho dV \\
&=& \rho \int (x^2 + y^2) dV \\
&=& \rho \left[ \int x^2 dV + \int y^2 dV \right] \\
&=& \rho \left[ F(2,0) + F(0,2) \right] \\
&=& 6 \left[ \frac{2! 0!}{(2+0+3)!} + \frac{0! 2!}{(0+2+3)!} \right] \\
&=& 6 \left[ \frac{2}{5!} + \frac{2}{5!} \right] \\
&=& 6 \left[ \frac{4}{120} \right] \\
&=& \frac{1}{5}
\end{eqnarray}
$$
$I_{xx}$ and $I_{yy}$
Note that if we relabel the axes (x, y, and z), the tetrahedron stays the same. So the integrals are symmetric. Therefore, we have:
$$
I_{xx} = I_{yy} = I_{zz} = \frac{1}{5}
$$
To restore the original values of $L$ and $M$, we note that the moment of inertia scales as $M L^2$. Therefore, we have:
$$
\mathbf{I} = M L^2 \begin{bmatrix}
\frac{1}{5} & - \frac{1}{20} & - \frac{1}{20} \\
- \frac{1}{20} & \frac{1}{5} & - \frac{1}{20} \\
- \frac{1}{20} & - \frac{1}{20} & \frac{1}{5} \\
\end{bmatrix} = \frac{M L^2}{20} \begin{bmatrix}
4 & -1 & -1 \\
-1 & 4 & -1 \\
-1 & -1 & 4 \\
\end{bmatrix}
$$
rotation || moment_of_inertia
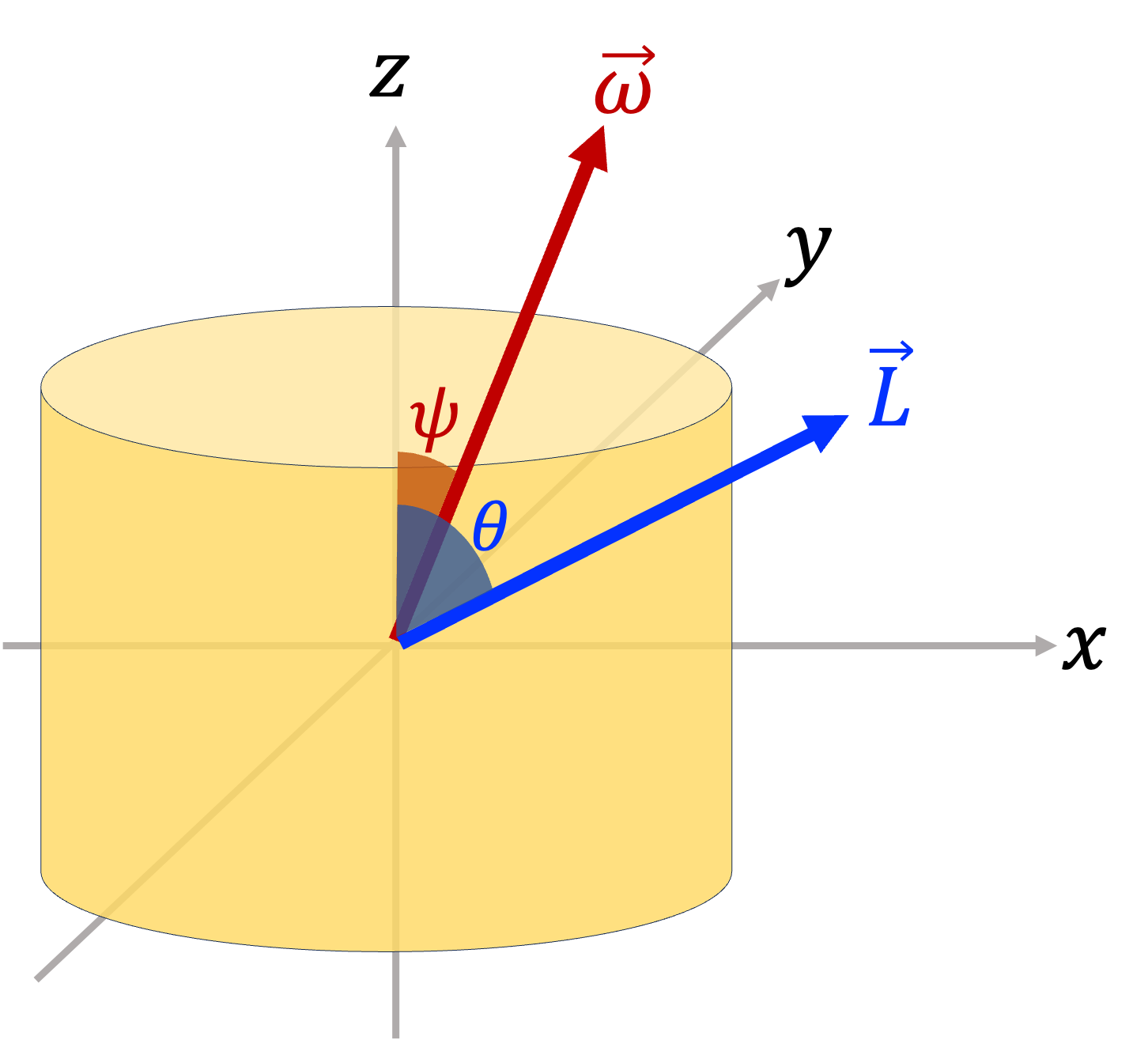
Example - The angle between $\vec L$ and $\vec \omega$ in a cylindrically symmetric object
A cylindrically symmetric object and the $\vec L$ and $\vec \omega$ vectors.
One consequence of treating moment of inertial as a tensor is that $\vec L$ and $\vec \omega$ are not necessarily aligned. Suppose the moment of inertia tensor of the object is given by:
$$
\mathbf{I} = \begin{bmatrix}
I_s & 0 & 0 \\
0 & I_s & 0 \\
0 & 0 & I_n \\
\end{bmatrix}
$$
If $\theta$ and $\psi$ are the angles $\vec L$ and $\vec \omega$ make with the $z$-axis respectively, and $\phi$ is the angle between $\vec L$ and $\vec \omega$, show that:
$$
\tan \phi = \frac{(I_s - I_n) \tan \theta}{I_s + I_n \tan^2 \theta}
$$
You can use the identity $\tan(\alpha - \beta) = \frac{\tan \alpha - \tan \beta}{1 + \tan \alpha \tan \beta}$.
Solution
By the cylindrical symmetry of the object, we can assume both $\vec L$ and $\vec \omega$ lie in the $xz$-plane without loss of generality. Therefore, we have:
$$
\vec \omega = \omega_x \hat i + \omega_z \hat k
$$
From the definition of the moment of inertia tensor, we have:
$$
\begin{eqnarray}
\vec L &=& \mathbf{I} \vec \omega \\
&=& \begin{bmatrix}
I_s & 0 & 0 \\
0 & I_s & 0 \\
0 & 0 & I_n \\
\end{bmatrix} \begin{bmatrix}
\omega_x \\
0 \\
\omega_z \\
\end{bmatrix} \\
&=& \begin{bmatrix}
I_s \omega_x \\
0 \\
I_n \omega_z \\
\end{bmatrix}
\end{eqnarray}
$$
Therefore, we have:
$$
\vec L = I_s \omega_x \hat i + I_n \omega_z \hat k
$$
In components, we have:
$$
\begin{eqnarray}
L_x &=& I_s \omega_x \\
L_z &=& I_n \omega_z \\
\end{eqnarray}
$$
From the definition of $\theta$ and $\phi$, we have:
$$
\begin{eqnarray}
\tan \theta &=& \frac{L_x}{L_z} = \frac{I_s \omega_x}{I_n \omega_z} \\
&=& \frac{I_s}{I_n} \frac{\omega_x}{\omega_z} \\
&=& \frac{I_s}{I_n} \tan \psi \\
\end{eqnarray}
$$
Rearranging, we have:
$$
\begin{eqnarray}
\tan \psi &=& \frac{I_n}{I_s} \tan \theta
\end{eqnarray}
$$
Therefore, we have:
$$
\begin{eqnarray}
\tan \phi &=& \tan (\theta - \psi) \\
&=& \frac{\tan \theta - \tan \psi}{1 + \tan \theta \tan \psi} \\
&=& \frac{\tan \theta - \frac{I_n}{I_s} \tan \theta}{1 + \tan \theta \frac{I_n}{I_s}} \\
&=& \frac{\tan \theta \left(1 - \frac{I_n}{I_s}\right)}{1 + \tan \theta \frac{I_n}{I_s}} \\
&=& \frac{(I_s - I_n) \tan \theta}{I_s + I_n \tan^2 \theta}
\end{eqnarray}
$$
Hey, it works!