3 meters East, 4 meters North is written as:
$$
\vec{v} = ( 3\hat i + 4 \hat j ) m
$$
5 meters West, 6 meters South is written as:
$$
\vec{v} = ( -5 \hat i -6 \hat j ) m
$$
For simplicity, we will ignore the units ("$m$" for meters above) of the vectors below.
A vector could take on different units depending on what it represents.
The $x$ and $y$ Components
The numbers $-5$ and $-6$ are the $x$ and $y$ components of $\vec{v} = -5 \hat i -6 \hat j$, denoted as:
$$
\begin{eqnarray}
v_x &=& -5 \\
v_y &=& -6 \\
\end{eqnarray}
$$
Notes:
$v_x$ and $v_y$ are numbers, not vectors, so no little "arrows" above ($v_x$, not $\vec v_x$).
⚠ No $\hat i, \hat j$ in the components ($v_x \neq -5 \hat i$!).
⚠ Don't write $x = -5$, $y=-6$ because a problem typically has more than one vectors, say $\vec v$, $\vec u$, $\vec B$. When you write $B_y$ (as opposed to just $y$), we know you mean the $y$-component of $\vec B$. $x$ and $y$ are usually reserved to represent position (i.e. the components of the displacement vector $\vec s$.
⚠ Never write $\hat i = -5$, $\hat j = -6$. You must never equate a vector ($\hat i$ or $\hat j$) to a scalar ($-5$ or $-6$ in the example).
Simulation - Vector Components
Drag the head of the arrow to see how its components change.
Content will be loaded by load_content.js
Content will be loaded by load_content.js
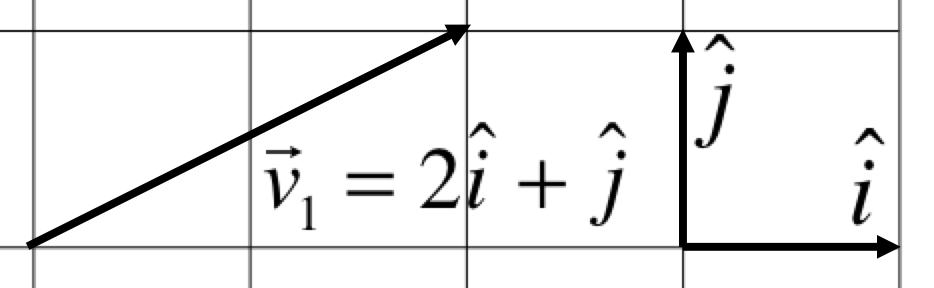
A few points about notations from the exercises:
$\vec v = 3\hat i + 0\hat j$ is usually written as $\vec v = 3\hat i$.
$\vec v = 4\hat i + 1\hat j$ is the same as $\vec v = 4\hat i + \hat j$.
$\vec v = 5\hat i + (-2) \hat j$ is written as $\vec v = 5\hat i - 2 \hat j$.
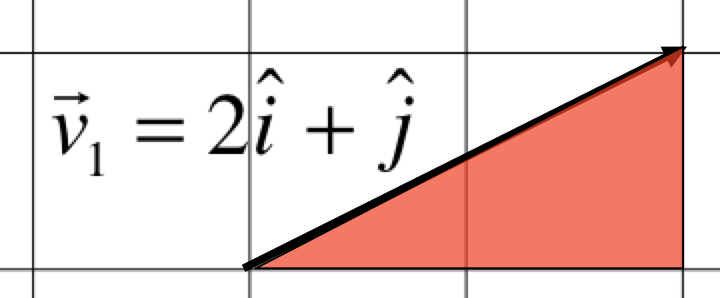
Magnitude
How long is this vector?$|\vec{v_1}| = \sqrt{2^2 + 1^2} = \sqrt{5} \approx 2.24$
What is the "magnitude"?
Magnitude is the length of a vector.
For example, $\vec v = 3\hat i$ has a magnitude of $3$.
Written as $|\vec v| = 3$ or $v=3$ (without the arrow!).
⚠ You really have to pay attention to the little arrow on the top!
⚠ Magnitude is NEVER negative!!! The shortest arrow you can draw has length $0$. Therefore $|\vec v| \geq 0$.
A vector could have negative components, but never negative magnitude.
Find magnitude by Pythagoras' theorem
Steps to find the magnitude:
Draw a triangle below the vector.
The magnitude is the hypotenuse of the triangle.
For $\vec v = a \hat i + b \hat j$:
$$
|\vec v| = \sqrt{a^2 + b^2}
$$
Content will be loaded by load_content.js
Content will be loaded by load_content.js
Vector Addition and Subtraction
Vectors are added or subtracted "component by component". For example:
$$
\begin{eqnarray}
\left\{
\begin{array}{l}
\vec{u} = 10 \hat i + 7 \hat j \\
\vec{v} = 3 \hat i -2 \hat j
\end{array}
\right. \\
\Rightarrow
\left\{
\begin{array}{l}
\vec{u} + \vec{v}= 13 \hat i + 5 \hat j \\
\vec{u} - \vec{v} = 7 \hat i +9 \hat j
\end{array}
\right.
\end{eqnarray}
$$
Content will be loaded by load_content.js
Content will be loaded by load_content.js
Simulation - Geometrical representation of vector addition
Geometrical representation of vector addition
Drag vectors out of the box, drag back to remove.
The individual vectors can be changed by dragging.
The red arrow is the sum of all the vectors.
Activity
Drag to line up (tail of one arrow on the head of another) all the blue arrows to see if they always combine to give the red arrow.
Line them up in a different order to see if they still produce the same total (red) vector.
Write out each vector in component form (i.e. with $ \hat i$ and $\hat j $) and add them up algebraically to see if it gives the same result.
Multiple or divide by a scalar
A vector can be multipled or divided by a scalar (i.e. a number). For example:
$$
\begin{eqnarray}
2\vec{v} &=& 2( 3 \hat i -2 \hat j) = 6 \hat i -4 \hat j \\
-\vec{v} &=& -( 3 \hat i -2 \hat j) = -3 \hat i +2 \hat j \\
\vec{v}/2 &=& \frac{1}{2}\vec{v} = \frac{1}{2} ( 3 \hat i -2 \hat j) = 1.5 \hat i - \hat j
\end{eqnarray}
$$
Multiplying $\vec{v}$ by 2 makes it twice as long.
Dividing $\vec{v}$ by 2 makes it half as long.
Multiplying $\vec{v}$ by $-1$ reverses its direction.
Content will be loaded by load_content.js
Content will be loaded by load_content.js
Decomposing a Vector
It is assumed that you have some basic knowledge of trigonometry.
If you are new to trigonometry, click here for the bare essentials.
It is assumed that you have some basic knowledge of trigonometry.
If you are new to trigonometry, click here for the bare essentials.
"Decomposing a vector" means finding the $x$ and $y$ components of a vector. Usually you will need to use some trignometry to get the answer.
Simulation - Vector Decomposition (click to hide)
Drag the head of the arrow to see how its components change.
Click "Switch View" to see different way to visualize the decomposition.
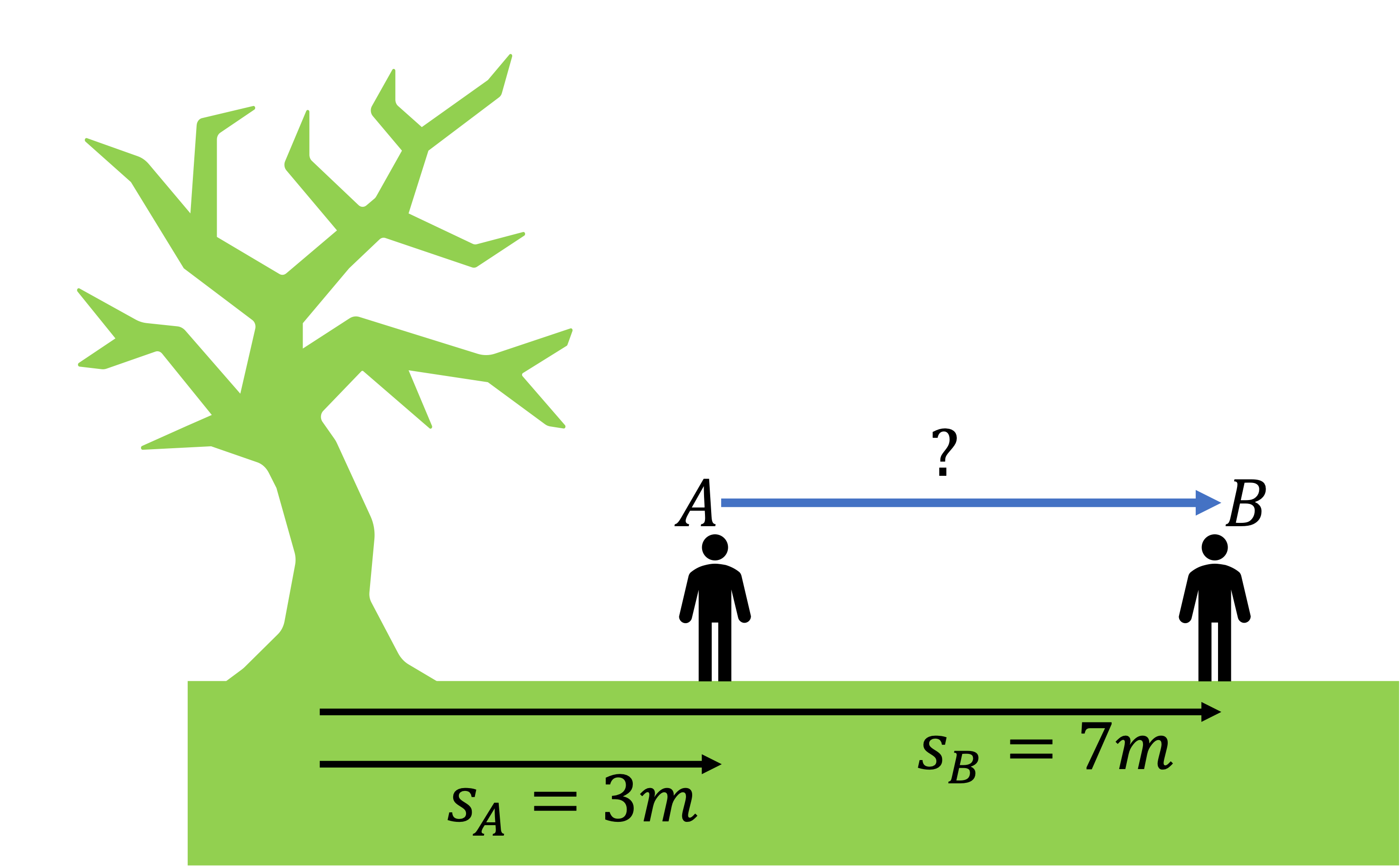
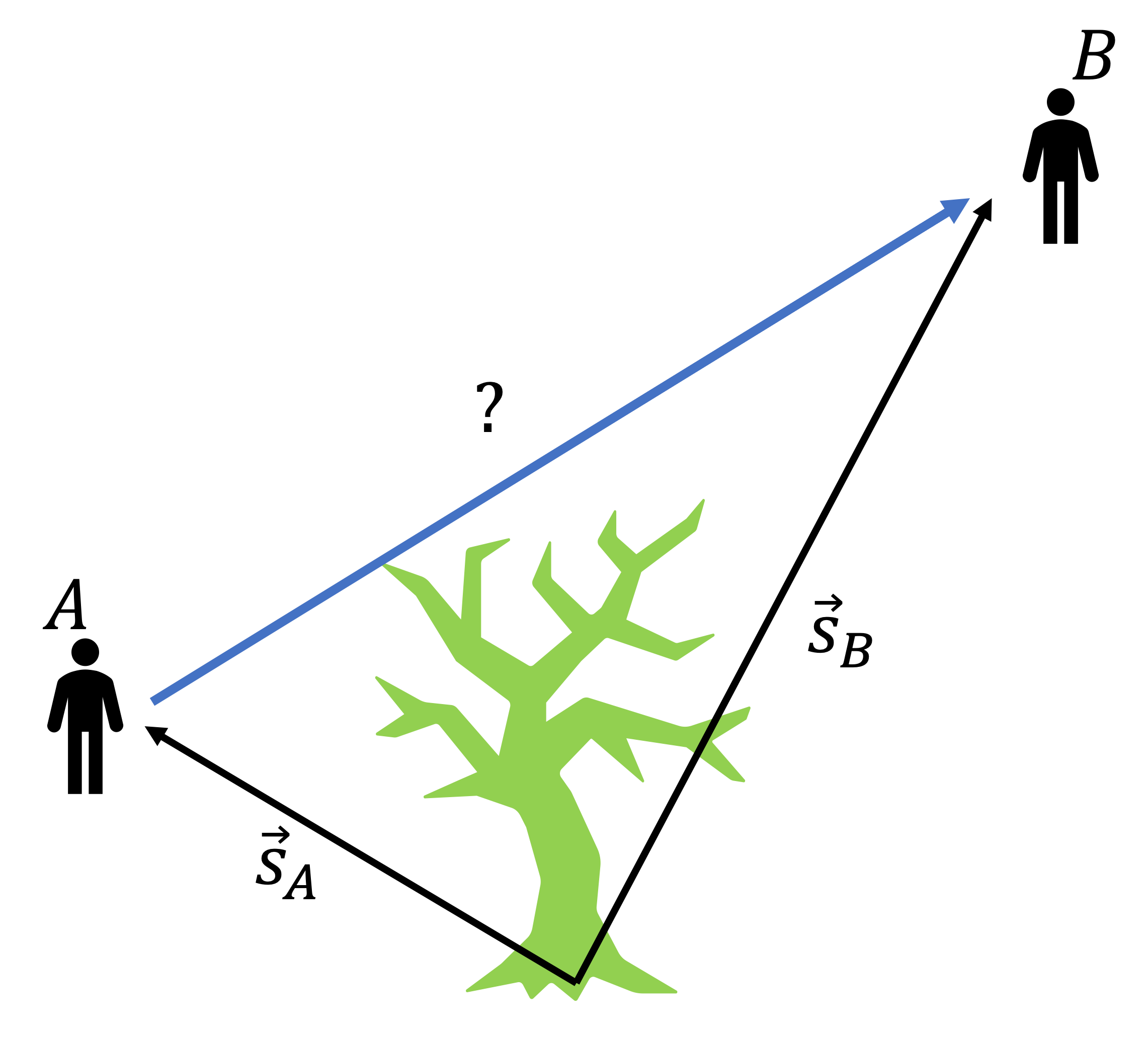
In the figure, when measured from the tree, Alice is at $s_A = 3m$, while Bob is at $s_B = 7m$. What is Bob's position relative to Alice? In other words, when Alice looks at Bob, how far is Bob from her perspective? It should not surprise you the relative position is the difference of the positions $s_A$ and $s_B$:
$$
\begin{eqnarray}
\Delta s_{BA} &=& s_B - s_A = 7m - 3m \\
&=& 4m
\end{eqnarray}
$$
One other way to think of $\Delta s_{BA}$ is the amount that Alice has to moved to get to Bob's location.
In 2D, Alice and Bob's positions can be expressed by vectors.
In higher dimensions, the situation is exactly the same. In the figure, suppose $\vec s_A = (-2\hat i + \hat j) m$ and $\vec s_B = (2 \hat i + 6 \hat j) m$, Bob's position relative to Alice is:
$$
\begin{eqnarray}
\Delta \vec s_{BA} &=& \vec s_B - \vec s_A \\
&=& ( 2 \hat i + 6 \hat j)m - (-2\hat i + \hat j)m \\
&=& (4\hat i + 5 \hat j) m
\end{eqnarray}
$$
To see why the relative position $\Delta \vec s_{BA}$ is the difference, just note that $\vec s_A + \Delta \vec s_{BA} = \vec s_B$ from the figure. Rearranging it gives the relation $\Delta \vec s_{BA} = \vec s_B - \vec s_A$.
Content will be loaded by load_content.js
Content will be loaded by load_content.js
Content will be loaded by load_content.js
Relative Velocity
You will learn later that velocity is defined to be the rate of change of displacement (i.e position). Therefore, the relative velocity $\Delta \vec v_{BA}$ is the rate of change of the relative position $\Delta \vec s_{BA}$:
$$
\begin{eqnarray}
\Delta \vec v_{BA} &=& \frac{d}{dt} \Delta \vec s_{BA} \\
&=& \frac{d}{dt} (\vec s_B - \vec s_A) \\
&=& \frac{d\vec s_B}{dt} - \frac{d\vec s_A}{dt} \\
&=& \vec v_B - \vec v_A
\end{eqnarray}
$$
In other words, the relative velocity of Bob from the perspective of Alice (i.e. Bob relative to Alice) $\Delta \vec v_{BA}$ is the difference of their velocities $\vec v_B$ and $\vec v_A$.
Content will be loaded by load_content.js
The Angle of a Vector
It is assumed that you have some basic knowledge of trigonometry.
If you are new to trigonometry, click here for the bare essentials.
It is assumed that you have some basic knowledge of trigonometry.
If you are new to trigonometry, click here for the bare essentials.
"The angle of a vector" means the angle the vector makes with the positive x-axis unless a specific axis is specified
For $\vec v = a \hat i + b \hat j$:
$$
\theta = \tan^{-1} (\frac{b}{a}) + \phi
$$
where $\phi= 0^\circ$ if $a \gt0$, and $ \phi= 180^\circ $ if $a\lt 0$
In other words, whenever the $x$-component is negative, you have to add $180^\circ$ to the result of the $tan^{-1}$ function.
Content will be loaded by load_content.js
Content will be loaded by load_content.js
Vector Multiplication
There are two ways to multiply two vector $\vec u$ and $\vec v$:
Dot product: $\vec u \cdot \vec v$ (also known as scalar product).
Cross product: $\vec u \times \vec v$.
Dot product
$$
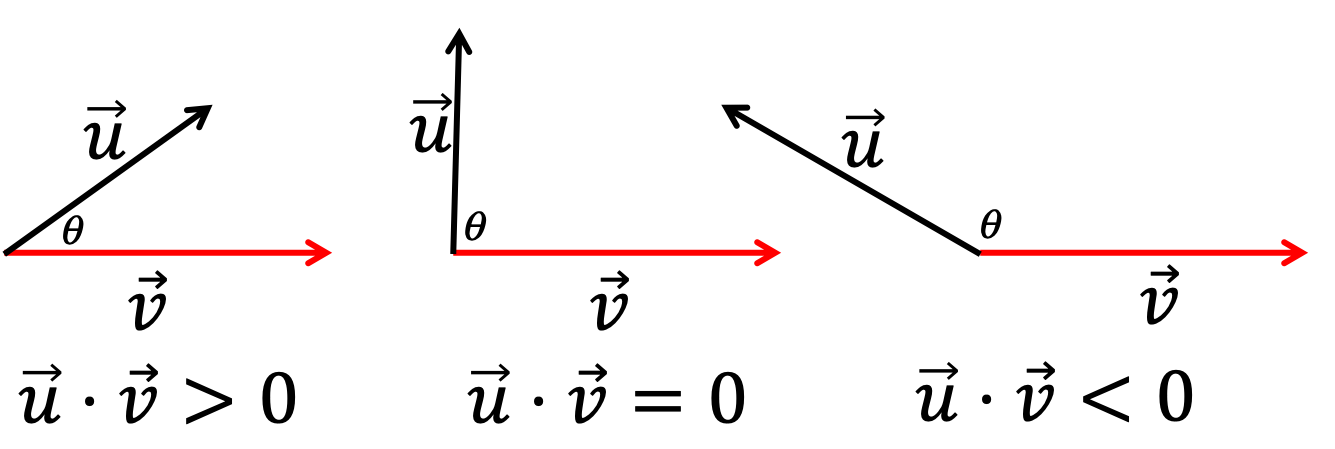
\vec u \cdot \vec v = u_x v_x + u_y v_y = |\vec u| |\vec v| \cos \theta
$$
Where $\theta$ is the angle between $\vec u$ and $\vec v$.
Dot product is also known as the scalar product because the result is a scalar (i.e. just a number, as opposed to a vector). Note that there are no more $\hat i, \hat j$ on the right hand side.
The generlization to higher dimensions is obvious. For example, in 3D it is $\vec u \cdot \vec v = u_x v_x + u_y v_y + u_z v_z$.
Mathematically, a dot product is related to projecting a vector into another direction (say $\vec u$ into the direction of $\vec v$, or vice versa).
The result of the dot product could be positive, zero, or negative, depending on the angle $ \theta $.
$$
\begin{eqnarray}
\vec u \times \vec v = && (u_y v_z - u_z v_y) \hat i \\
&+& (u_z v_x - u_x v_z) \hat j \\
&+& (u_x v_y - u_y v_x) \hat k
\end{eqnarray}
$$
One can also use the determinant below to express the cross product:
$$
\vec u \times \vec v =
\begin{vmatrix}
\hat i & \hat j & \hat k \\
u_x & u_y & u_z \\
v_x & v_y & v_z
\end{vmatrix}
$$
Some basic facts about the cross product:
$\vec u \times \vec v = -\vec v \times \vec u$, so the order is important.
$|\vec u \times \vec v| = |\vec u| |\vec v| |\sin \theta | $, where $\theta$ is the angle between the vectors.
If $\vec w = \vec u \times \vec v$, then $\vec w \perp \vec u$ and $\vec w \perp \vec v$. So even if $\vec u$ and $\vec v$ are 2D (say on the $xy$-plane), $\vec w$ will automatically has a $z$-component. Cross product is inherently 3D.
We can use the cross product to calculate torque $\tau = \vec r \times \vec F$, angular momentum $\vec L = \vec r \times \vec p$, and magnetic force $\vec F_B = q \vec v \times \vec B$.
Simulation - Cross Product
Cross Product
Use the slider above to adjust the angle between the vectors.
Content will be loaded by load_content.js
Content will be loaded by load_content.js
Dot Product
$$
\vec u \cdot \vec v = u_x v_x + u_y v_y = |\vec u| |\vec v| \cos \theta
$$
where $\theta$ is the angle between $\vec u$ and $\vec v$.
Dot product is also known as the scalar product because the result is a scalar (i.e. just a number, as opposed to a vector). Note that there are no more $\hat i, \hat j$ on the right hand side.
The generlization to higher dimensions is obvious. For example, in 3D it is $\vec u \cdot \vec v = u_x v_x + u_y v_y + u_z v_z$.
Mathematically, a dot product is related to projecting a vector into another direction (say $\vec u$ into the direction of $\vec v$, or vice versa).
The result of the dot product could be positive, zero, or negative, depending on the angle $ \theta $.
$$
\begin{eqnarray}
\vec u \times \vec v = && (u_y v_z - u_z v_y) \hat i \\
&+& (u_z v_x - u_x v_z) \hat j \\
&+& (u_x v_y - u_y v_x) \hat k
\end{eqnarray}
$$
One can also use the determinant below to express the cross product:
$$
\vec u \times \vec v =
\begin{vmatrix}
\hat i & \hat j & \hat k \\
u_x & u_y & u_z \\
v_x & v_y & v_z
\end{vmatrix}
$$
Some basic facts about the cross product:
$\vec u \times \vec v = -\vec v \times \vec u$, so the order is important.
$|\vec u \times \vec v| = |\vec u| |\vec v| |\sin \theta | $, where $\theta$ is the angle between the vectors.
If $\vec w = \vec u \times \vec v$, then $\vec w \perp \vec u$ and $\vec w \perp \vec v$. So even if $\vec u$ and $\vec v$ are 2D (say on the $xy$-plane), $\vec w$ will automatically has a $z$-component. Cross product is inherently 3D.
We can use the cross product to calculate torque $\tau = \vec r \times \vec F$, angular momentum $\vec L = \vec r \times \vec p$, and magnetic force $\vec F_B = q \vec v \times \vec B$.
Simulation - Cross Product
Cross Product
Use the slider above to adjust the angle between the vectors.
Content will be loaded by load_content.js
Content will be loaded by load_content.js
Units
In Physics (as opposed to in your Math classes), vectors almost always have units. While we have been ignoring the units for simplicity earlier, you should remember to include them in the exams.