Starting from this chapter, we will often use radians instead of degrees to measure angles. You need to know how to convert between these two units:
$$
\begin{eqnarray}
\theta_{\text{radian}} &=& \frac{\pi}{180^\circ} \theta_{\text{degree}} \\
\theta_{\text{degree}} &=& \frac{180^\circ}{\pi} \theta_{\text{radian}}
\end{eqnarray}
$$
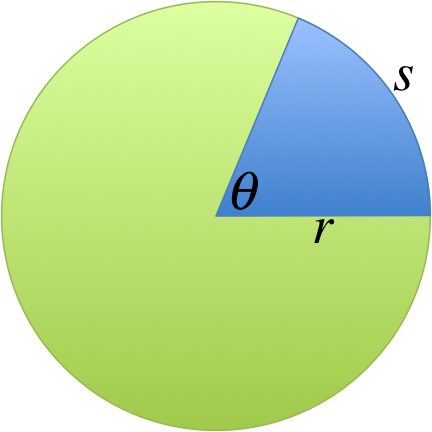
Radian is defined as the ratio of the arc length $s$ to the radius $r$:
$$ \theta = \frac{s}{r} $$
For example, since for one complete circle $s=2\pi r$, we get $\theta = 2\pi$, hence there are $2\pi$ radians in one circle.
This definition also shows that radian is a "dimensionless unit", meaning that it is the same as 1 (or having no units) because both $s$ and $r$ are lengths, their ratio would have no unit. You should treat "$rad$" as just a placeholder, so saying $\theta = 20 rad $ is the same as saying $\theta = 20$. The same cannot be said for degrees, if you want to say $\theta = 20^\circ$, you absolutely cannot omit the symbol "$^\circ$", otherwise radians will be assumed.
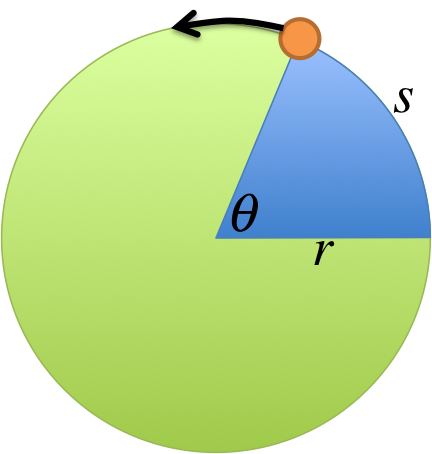
Imagine an object running around the circle, the rate at which the angle $\theta$ increases is defined to be the angular velocity $\omega$:
$$ \omega = \frac{d\theta}{dt} $$
The unit for angular velocity is $rad/s$. Note that the symbol for angular velocity is the Greek letter "omega", and not the English letter "w".
For example, if $\omega = 2rad/s$, it means that the angle increases by $2rad$ every second.
If it is uniform circular motion (i.e. maintaining the same speed as it runs around the circle), the above equation simplifies to:
$$ \omega = \frac{\Delta \theta}{\Delta t} $$
Simulation - The Basics of Circular Motion
Adjust the sliders to see:
how long it takes for the object to go around the circle once (period);
how many revolutions the object can complete in one second (frequency);
how many radians the object can cover per second (angular velocity).
Content will be loaded by load_content.js
Other Variables
Name
Symbol
Unit
Meaning
Angular velocity
$\omega$
$ rad/s$
rate of change of angle
Linear (or tangential) speed
$v$
$ m/s $
distance traveled per second
Period
$T$
$s$
time to complete one cycle
Frequency
$f$
$Hz = rps$
number of cycles per second
$rps$ stands for "revolutions per second", which is identical to $Hz$ and $s^{-1}$.
Here are the equations that connect the variables together:
$$
\begin{eqnarray}
v &=& \omega r\\
\omega &=& \frac{2\pi}{T} &=& 2\pi f
\end{eqnarray}
$$
By definition, period $T$ is the time the object takes to go around the circle once. During that time, $\theta$ increases by $2\pi$, therefore:
$$
\begin{eqnarray}
\omega &=& \frac{\Delta \theta}{\Delta t} \\
&=& \frac{2\pi}{T}
\end{eqnarray}
$$
In one period $T$, the distance traveled should just be the circumference of the circle, i.e. $2\pi r$. Therefore $v$, "distance traveled per second", is given by:
$$
\begin{eqnarray}
v &=& \frac{2\pi r}{T} = \frac{2\pi }{T}r\\
&=& \omega r
\end{eqnarray}
$$
As for the equation relating $f$, you could ask the following question: suppose it takes an object $T=1/2s$ to complete one cycle, how many revolution can it make per second? The answer is 2, so $f=\frac{1}{T}$. If it takes $T=1/3s$ for one revolution, how many revolutions can it make per second? Some thinking tells you it would be 3, again giving $f=\frac{1}{T}$.
Since we already know $\omega = \frac{2\pi}{T}$, we have:
$$
\begin{eqnarray}
\omega &=& \frac{2\pi}{T} = 2\pi\frac{1}{T}\\
&=& 2\pi f
\end{eqnarray}
$$
Content will be loaded by load_content.js
Content will be loaded by load_content.js
Content will be loaded by load_content.js
Content will be loaded by load_content.js
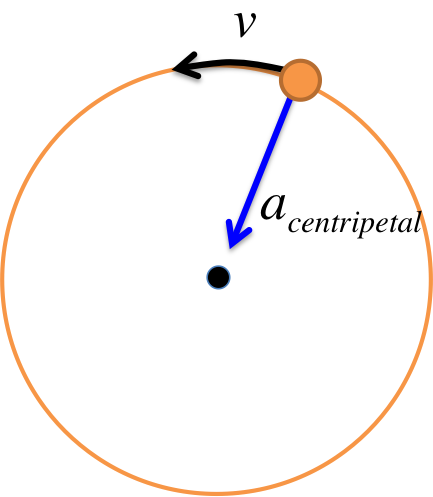
Centripetal Acceleration
Uniform circular motion: centripetal acceleration always points toward the center.
Uniform circular motion, meaning an object's speed stays the same as it goes around a circle. There is an
acceleration on the object pointing toward the center:
$$ a_{\text{centripetal}} = r \omega^2 = \frac{v^2}{r} $$
This acceleration is called the "centripetal acceleration". The two expressions on the right are equivalent because
$v = \omega r$.
Why should there be an acceleration if the object is not speeding up nor slowing down? This is related to the
difference between velocity and speed. During uniform circular motion, the speed (i.e. the magnitude of the
velocity) stays constant but the velocity does not. The velocity points in different directions as the object goes
around the circle, even though its magnitude never changes. Since acceleration is the rate of change of velocity
(not the speed), you get a non-zero acceleration. In other words, the centripetal acceleration describes the change
in the direction of the velocity.
The position of an object at angle $\theta$ at radius $r$ is $\vec r = r \cos \theta \hat i + r \sin \theta \hat j$. Note that we used $\vec r$ instead of $\vec s$ to denote the position (i.e. displacement) as is common practice when describing circular motion, but it is really the same thing. You can think of $\vec r$ as the radius vector.
When the object is rotating at angular velocity $\omega$, then $\theta = \omega t$, giving:
$$
\vec r = r \cos (\omega t) \hat i + r \sin (\omega t) \hat j
$$
Differentiating w.r.t. time gives:
$$
\begin{eqnarray}
\vec v &=& \frac{d\vec r}{dt} = -\omega r \sin (\omega t) \hat i + \omega r \cos (\omega t) \hat j \\
\Rightarrow \vec a &=& \frac{d\vec v}{dt} = -\omega^2 r \cos (\omega t) \hat i - \omega^2 r \sin (\omega t) \hat j \\
&=& -\omega^2 r( \cos (\omega t) \hat i + \sin (\omega t) \hat j )\\
\Rightarrow \vec a &=& -\omega^2 \vec r
\end{eqnarray}
$$
This give a centripetal acceleration $\vec a$ pointing radially inward toward the center of the circle (i.e. opposite to $\vec r$).
Taking the magnitude, we have:
$$
a = \omega^2 r
$$
as was stated before.
Content will be loaded by load_content.js
Content will be loaded by load_content.js
Content will be loaded by load_content.js
Content will be loaded by load_content.js
Centripetal Force and Acceleration
Uniform circular motion: centripetal acceleration always points toward the center.
Uniform circular motion, meaning an object's speed stays the same as it goes around a circle. There is an
acceleration on the object pointing toward the center:
$$ a_{\text{centripetal}} = r \omega^2 = \frac{v^2}{r} $$
This acceleration is called the "centripetal acceleration". The two expressions on the right are equivalent because
$v = \omega r$.
Why should there be an acceleration if the object is not speeding up nor slowing down? This is related to the
difference between velocity and speed. During uniform circular motion, the speed (i.e. the magnitude of the
velocity) stays constant but the velocity does not. The velocity points in different directions as the object goes
around the circle, even though its magnitude never changes. Since acceleration is the rate of change of velocity
(not the speed), you get a non-zero acceleration. In other words, the centripetal acceleration describes the change
in the direction of the velocity.
Newton's second Law ($F=ma$) tells us any acceleration implies the presence of a net force. In this case, the
centripetal acceleration must be caused by a force pointing toward the center, called the "centripetal force", given
by:
$$F_{\text{centripetal}} = m a_{\text{centripetal}} = m r \omega^2 = \frac{mv^2}{r} $$
The physical origin of the centripetal force depends on the situation. For example, the centripetal force that keeps
the moon in orbit around the earth is the force of gravity.
Simulation - Centripetal Force
Adjust the sliders to see how the trajectory is affected.
Can you calculate the radius of the trajectory?
Circular motion has already been covered in the chapter on force. Please review before continuing. Here is a quick recap.
Circular motion has already been covered in the chapter on 2D motion. Please review before continuing. Here is a quick recap.
Name
Symbol
Unit
Meaning
Angular velocity
$\omega$
$ rad/s$
rate of change of angle
Linear (or tangential) speed
$v$
$ m/s $
distance traveled per second
Period
$T$
$s$
time to complete one cycle
Frequency
$f$
$Hz = rps$
number of cycles per second
$rps$ stands for "revolutions per second", which is identical to $Hz$ and $s^{-1}$.
Here are the equations that connect the variables together:
$$
\begin{eqnarray}
v &=& \omega r\\
\omega &=& \frac{2\pi}{T} &=& 2\pi f
\end{eqnarray}
$$
Content will be loaded by load_content.js
Content will be loaded by load_content.js
Content will be loaded by load_content.js
Angular Acceleration
Previously we have been considering uniform circular motion. In this section, we will consider cases when the object is speeding up or slowing down at a constant rate. Just like we define linear acceleration as the rate of change of linear velocity, here we define angular acceleration as the rate of change of the angular velocity:
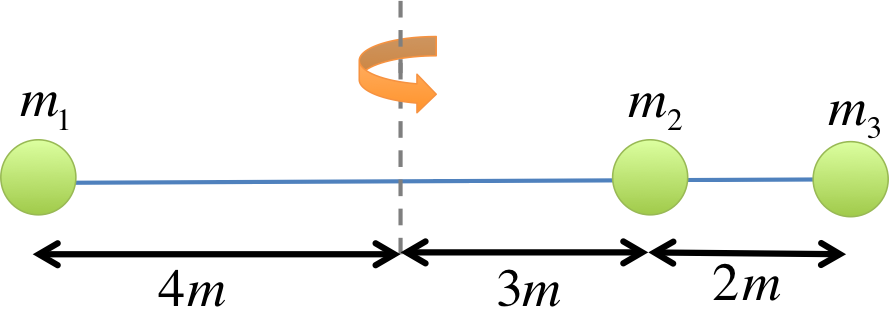
Three masses ($m_1=1kg, m_2=2kg, m_3=3kg$), rotating about a vertical axis.
The "moment of inertia" (also known as "rotational inertia") for this object is:
$$
\begin{eqnarray}
I &=& m_1 r_1^2 + m_2 r_2^2 + m_3 r_3^2 \\
&=& (1) (4^2) + (2) (3^2) + (3) (3+2)^2\\
&=& 16+ 18 + 75\\
&=& 109kgm^2
\end{eqnarray}
$$
$r$ is defined to be the distance between the mass and the axis of rotation, which explains why $r_3 = 3+2=5m$.
You can also think of $r$ as the radius of the circular trajectory followed by each mass.
The sign of $r$ does not matter because it is squared.
What is moment of inertia?
The tendency of an object to remain in its current state of rotational motion.
Compare with mass (or inertia), which is the tendency of an object to remain in its current state of linear motion.
Given an non-rotating object, the more moment of inertia it has, the harder it is to rotate the object.
⚠ $I$ changes if the axis of rotation or the masses are moved relative to each other.
SI unit: $kgm^2$
Simulation - Moment of Inertia
Drag the objects to different location and use the sliders to adjust their mass.
Calculations will appear here.
Content will be loaded by load_content.js
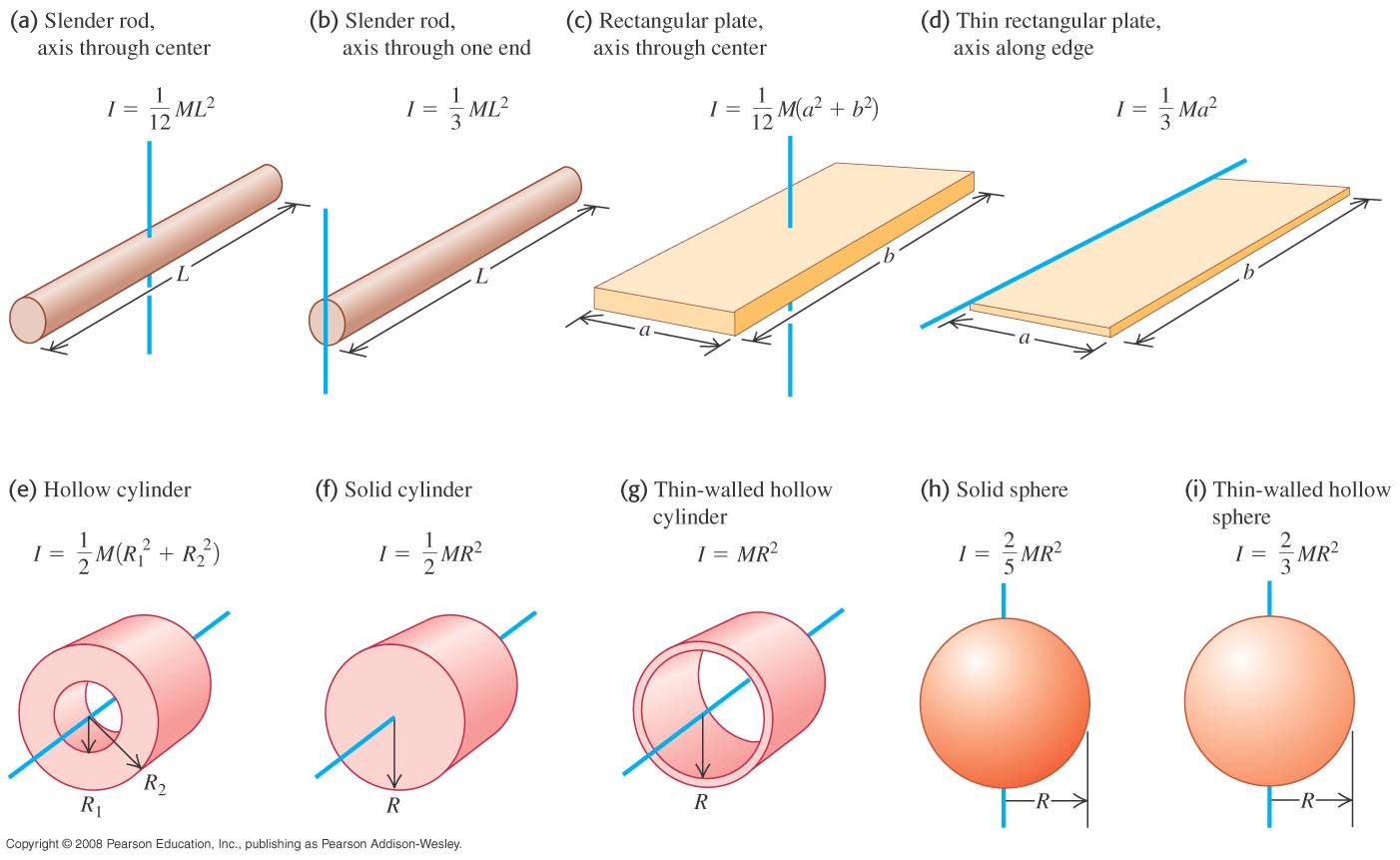
Moment of inertia of common objects.
For objects that consists of more than a few point masses, $I$ can be found by integration. One special case is a disk, which is really just a really thin solid cylinder. According to the figure, we have $I_{\text{disk}} = \frac{1}{2}MR^2$.
You do not need to memorize these equations because they will be provided to you in the exam.
For an extended object with its mass spread out over a volume, we can use integration to find the moment of inertia. See the examples below.
Bar rotating about the edge
A bar of length $L$ and total mass $M$ rotating about the edge. The red segment of length $dr$ has mass $dm$.
A segement highlighted in red with mass $dm$ makes a small contribution $dI = r^2 dm$ to the moment of inertia. Summing up all possible segments:
$$
\begin{eqnarray}
I = \int dI &=& \int r^2 dm \\
&=& \int_0^L r^2 \frac{M}{L}dr &\text{ because $dm = \frac{M}{L}dr$} \\
&=& \frac{M}{L} \int_0^L r^2 dr \\
&=& \frac{M}{L} (\frac{1}{3}L^3) \\
&=& \frac{1}{3} M L^2
\end{eqnarray}
$$
Bar rotating about the center
$r$ now goes from $-L/2$ to $+L/2$.
This case is similar, the only change needed is the limits of integration:
$$
\begin{eqnarray}
I = \int dI &=& \int r^2 dm \\
&=& \int_{-L/2}^{+L/2} r^2 \frac{M}{L}dr &\text{ the limits are not from $0$ to $L$ anymore} \\
&=& \frac{M}{L} \int_{-L/2}^{+L/2} r^2 dr \\
&=& \frac{M}{L} \frac{1}{3}((\frac{L}{2})^3- (-\frac{L}{2})^3) \\
&=& \frac{1}{12} M L^2
\end{eqnarray}
$$
The two results $I_{edge} = \frac{1}{3} M L^2$ and $I_{center} = \frac{1}{12} M L^2$ are actually related to each other via the Parallel Axis Theorem below.
Ring rotating about the center
The red segment of the ring has mass $dm$. Any segements of the ring is at distance $r=R$ from the center. $M$ is the total mass.
The ring is the simplest case of all, because any segments of the ring is the same distance from the center, so we are just integrating over a constant:
$$
\begin{eqnarray}
I = \int dI &=& \int R^2 dm \\
&=& R^2 \int dm \\
&=& M R^2
\end{eqnarray}
$$
Disc rotating about the center
The highlighted area element has an area $dA = (rd\theta) (dr) = r dr d\theta$, and mass $dm$. $M$ is the total mass, $A=\pi R^2$ is the total area, so the mass density is $\frac{M}{A} = \frac{M}{\pi R^2}$.
The mass of the highlighted area element is $dm$. We can write it in terms of $dA = r dr d\theta$:
$$
\begin{eqnarray}
\frac{dm}{M} &=& \frac{dA}{A} \\
\Rightarrow dm &=& \frac{M}{A} dA \\
&=& \frac{M}{\pi R^2} r dr d\theta
\end{eqnarray}
$$
Put into the integral for $I$:
$$
\begin{eqnarray}
I = \int dI &=& \int r^2 dm \\
&=& \int \int r^2 (\frac{M}{\pi R^2} r dr d\theta) \\
&=& \int_0^R r^2 \frac{M}{\pi R^2} r dr \int_0^{2\pi} d\theta \\
&=& \frac{M}{\pi R^2} \int_0^R r^3 dr \int_0^{2\pi} d\theta \\
&=& \frac{M}{\pi R^2} (\frac{1}{4}R^4) (2\pi) \\
&=& \frac{1}{2} M R^2
\end{eqnarray}
$$
You should know how to derive the above cases with integration. You do not need to memorize the equations for the other shapes because they will be provided to you in the exam.
Content will be loaded by load_content.js
Moment of Inertia Tensor
Disclaimer
The moment of inertia tensor goes beyond the scope of this course. However, I thought it would be fun to include it here for those interested in learning more about rotation.
I should add that this is not an endorsement of Elon Musk. My students all know my scientific hero is Isaac Newton, but I am pretty sure I would not like him if I met him. Still, you cannot fault the man's scientific genius. In the same light, we can all learn a lot from Musk and his incredible achievements regardless any personal reservations we may have about him.
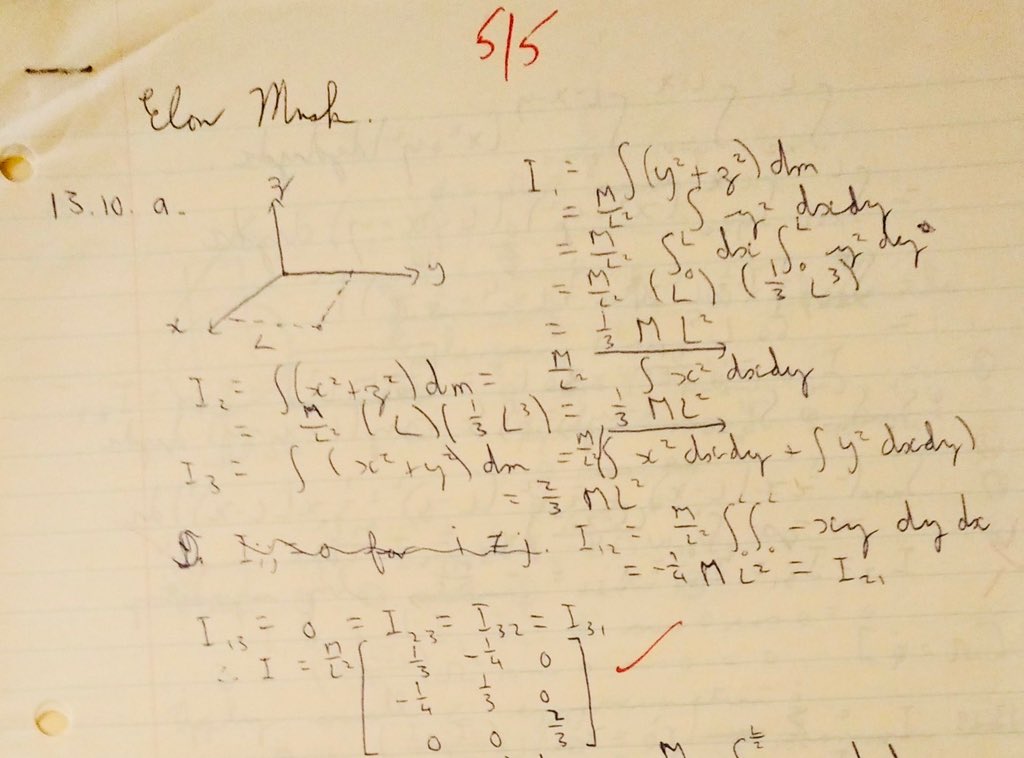
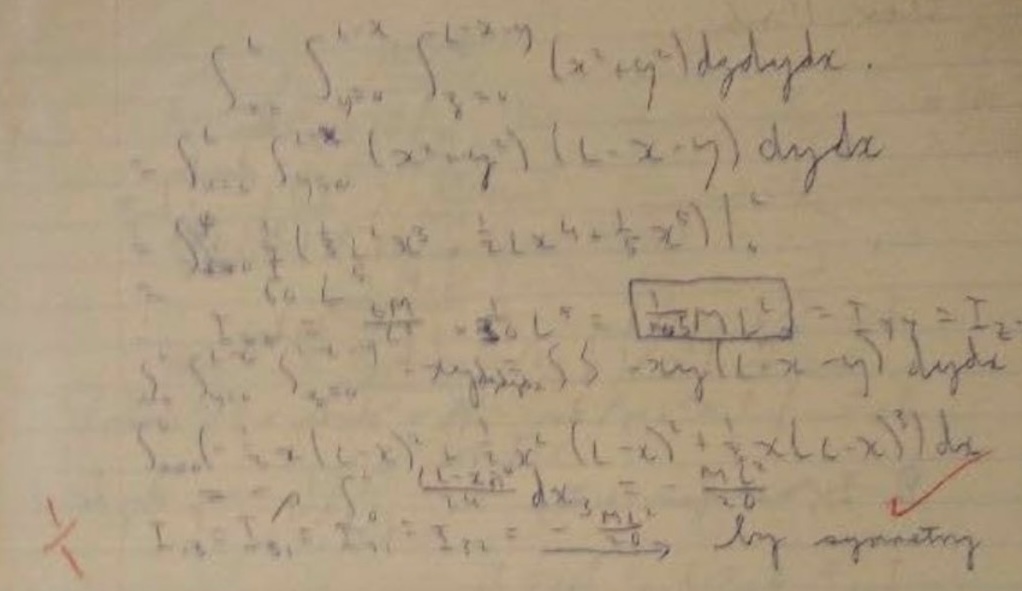
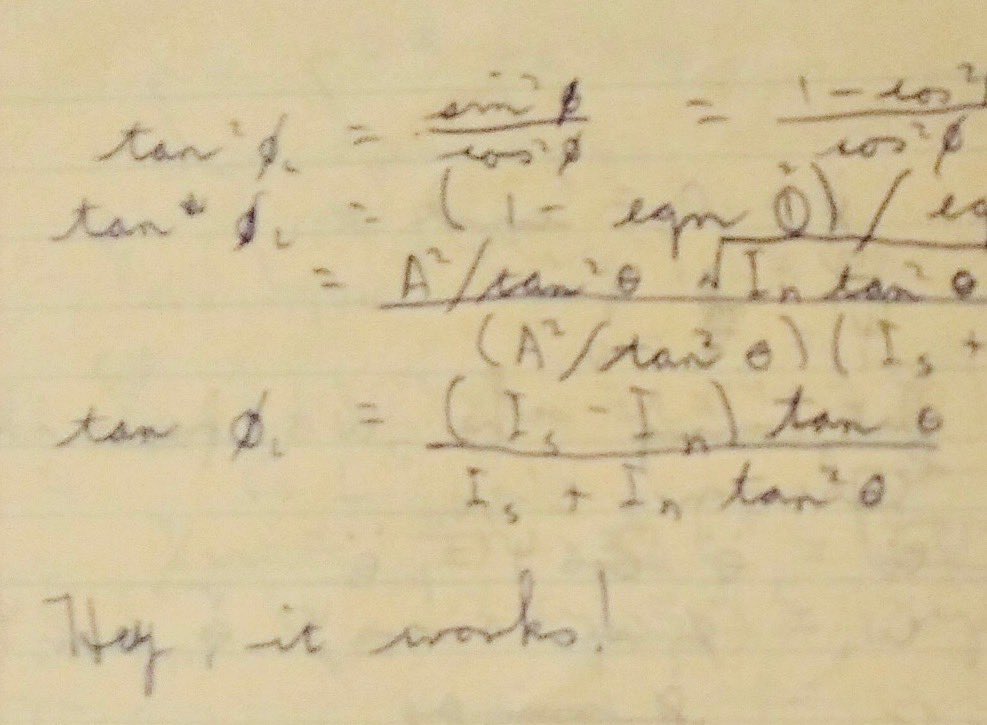
Elon Musk's Physics Homework
Are you at least as smart as Elon Musk? Below are some of his physics homework from college, they all happened to be on the moment of inertia tensor. I read that he made all the major engineering decisions at SpaceX and Tesla, so he must know a fair bit of physics. Just for fun, I recreated his homework below, as well as the background to understand the moment of inertia tensor. While the calculation below looks a bit complicated, it is just a straightforward generalization of what you have already learned about moment of inertia. Our $I$ for planar rotation is just the $I_{zz}$ component of the moment of inertia tensor below. To get the other components, you just do a few more integrals. There are other interesting consequences of changing from a scalar $I$ to a tensor $\mathbf{I}$, but I will not go into it in this brief section.
The moment of inertia defined above only works for rotation about a single axis. For example, if you have a disk lying flat on a table, the moment of inertia about the vertical axis through the center is $I = \frac{1}{2} MR^2$. However, if you try to rotate the disk about a horizontal axis through the center, the moment of inertia is different.
In general 3D, the moment of inertia depends on the axis of rotation. To fully describe the moment of inertia of a 3D object, we need to use the moment of inertia tensor. To derive the moment of inertia tensor, we start with the definition of angular momentum for a single mass $m$ located at position $\vec r = x \hat i + y \hat j + z \hat k$ with momentum $\vec p$:
$$
\vec L = \vec r \times \vec p
$$
For a rigid body rotating about some axis with angular velocity $\vec \omega$, the momentum of each mass element is given by:
$$
\vec p = m \vec v = m (\vec \omega \times \vec r)
$$
Putting this into the equation for angular momentum:
$$
\begin{eqnarray}
\vec L &=& \vec r \times (m (\vec \omega \times \vec r)) \\
&=& m \vec r \times (\vec \omega \times \vec r) \\
&=& m [ (\vec r \cdot \vec r) \vec \omega - (\vec r \cdot \vec \omega) \vec r ] \qquad \text{ using vector triple product} \\
&=& m [ r^2 \vec \omega - (\vec r \cdot \vec \omega) \vec r ]
\end{eqnarray}
$$
where $r^2 = x^2 + y^2 + z^2$.
In index notation, this is:
$$
\begin{eqnarray}
L_i &=& m ( r^2 \omega_i - r_i r_j \omega_j ) \\
&=& \sum_j m ( r^2 \delta_{ij} \omega_j - r_i r_j \omega_j ) \\
&=& \sum_j m ( r^2 \delta_{ij} - r_i r_j ) \omega_j \\
&=& \sum_j I_{ij} \omega_j \quad \text{ where } I_{ij} = m ( r^2 \delta_{ij} - r_i r_j )
\end{eqnarray}
$$
Here, $I_{ij}$ is the moment of inertia tensor for a single mass element. The symbol $\delta_{ij}$ is called the Kronecker delta, which is equal to $1$ if $i=j$ and $0$ otherwise.
To sum over all mass elements, we replace $m$ by $dm$ and integrate:
This is the general definition of the moment of inertia tensor for a rigid body.
If we write out the moment of inertia tensor in matrix form, we have:
$$
\mathbf{I} =
\begin{bmatrix}
I_{xx} & I_{xy} & I_{xz} \\
I_{yx} & I_{yy} & I_{yz} \\
I_{zx} & I_{zy} & I_{zz}
\end{bmatrix}
$$
where the diagonal elements are given by:
$$
\begin{eqnarray}
I_{xx} &=& \int (y^2 + z^2) dm \\
I_{yy} &=& \int (x^2 + z^2) dm \\
I_{zz} &=& \int (x^2 + y^2) dm
\end{eqnarray}
$$
and the off-diagonal elements (called "products of inertia") are given by:
$$
\begin{eqnarray}
I_{xy} = I_{yx} &=& -\int xy \, dm \\
I_{xz} = I_{zx} &=& -\int xz \, dm \\
I_{yz} = I_{zy} &=& -\int yz \, dm
\end{eqnarray}
$$
The moment of inertia tensor is used in advanced mechanics courses. You do not need to learn about it in this course.
Moment of Inertia Tensor Examples
Below are some the problems I reversed engineered from Elon Musk's homework solutions. Since the original questions are missing from the posts, I made an educated guess on what the questions were. My versions below should be fairly similar to the original questions.
You can think of $KE_{\text{linear}}$ as the energy due to the translational motion of the center of mass, while $KE_{\text{rotational}}$ is the energy related to the rotation about some axis. In many problems, both types of kinetic energy are present, in which case you would use:
$$KE_{\text{total}} = \frac{1}{2} mv^2+ \frac{1}{2} I \omega^2 $$
An example is a wheel rolling on the ground. The center of mass is going forward (so $KE_{\text{linear}}$ is non-zero) as it spins about its central axis (so $KE_{\text{rotational}}$ is non-zero as well).
Content will be loaded by load_content.js
Content will be loaded by load_content.js
Simulation - Rolling down an incline
Drag on the surface of the incline to change the angle.
The length of the track is $20m$. The mass of each object is $1kg$.
$I_{disk} = \frac{1}{2} m r^2, I_{ring} = m r^2 $.
Activity
Work out the energy of each object at the bottom.
Can you explain why the block arrives at the bottom first, followed by the disc and then the ring?
Content will be loaded by load_content.js
Content will be loaded by load_content.js
Comparison with a sliding problem:
Content will be loaded by load_content.js
Parallel Axis Theorem
Suppose you know the moment of inertia $I_{CM}$ of an object about an axis passing through its center of mass. The parallel axis theorem states that if you shift the axis by distance $d$ (while keeping the axis parallel), the new value of the moment of inertia is:
$$I = I_{CM} + m d^2$$
Content will be loaded by load_content.js
Content will be loaded by load_content.js
Content will be loaded by load_content.js
Content will be loaded by load_content.js
Notations
Name
Symbol
Unit
Meaning
Angle (or angular displacement)
$\theta$
$ rad$
angle of the circular path
Angular velocity
$\omega$
$ rad/s$
rate of change of angle
Angular acceleration
$\alpha$
$ rad/s^2$
rate of change of anglular velocity
Linear (or tangential) speed
$v$
$ m/s $
distance traveled per second
Period
$T$
$s$
time to complete one cycle
Frequency
$f$
$Hz = rps$
number of cycles per second
Centripetal acceleration
$a_{\text{centripetal}}$
$m/s^2$
the acceleration of an object undergoing uniform circular motion
Centripetal force
$F_{\text{centripetal}}$
$N$
the force that keeps an object in circular orbit
Moment of inertia
$I$
$kg\cdot m^2$
the tendency to remain in an object's current state of rotational motion